







帮助中心主页



Robokit 功能文档















移动机器人通识
底盘类型
屏幕
外部机构
地图构建及定位
识别
条形码识别
复合机器人识别
3D 点云识别
2D 激光识别
标定
标定类型
导航
机构脚本
机构脚本编程规范
【草稿】机构脚本课程培训
导航
打滑检测
机构脚本接口字典
辊筒车
功能授权
附录
参数及报警码
启用红外相机辅助定位功能
一,2D激光地图创建
请参考2D地图创建说明,由于相机只是一种辅助定位功能,机器人的核心定位精度还是由激光定位决定的,因此必须要创建当前场景的激光地图。
二,天花板二维码地图生成
当完成SEERTAG的部署后,进行红外相机外参标定,标定完成后,方可开启方天花板二维码地图。算法内部会自动检测相机外参标定与否,如标定成功,则进入天花板二维码创建。如果需要重新标定则需清空之前的标定参数。
2.1 开启天花板二维码建图功能
当场景中部署完成天花板二维码时,即可使用RoboShop 2.4.1.92以上版本,建立天花板二维码地图,当创建二维码时,需要手动控制机器人在每一个二维码下进行运动,进而保证二维码姿态的准确性。当捕获到二维码时,当前检测到的二维码ID便出现在RoboShop的地图界面上。完成场景中所有二维码的部署后,可点击停止识别结束建图。
2.2 天花板二维码建图功能注意事项
如果出现多个天空二维码重叠现象,这是由于光线和视角引起了错误识别。进入地图编辑后,删除错误的二维码,在该位置通过点击开始识别,重新录入此处的二维码即可。
三,天花板二维码地图和激光地图融合
3.1. 配置融合地图的SEERTAG定位区域
3.2. 推送使用地图
得到生成地图之后,将地图进行推送到控制器中,完成建图任务。在高级定位区域中,如果检测到二维码,则使用二维码进行定位,如果未看到二维码,则使用里程计定位。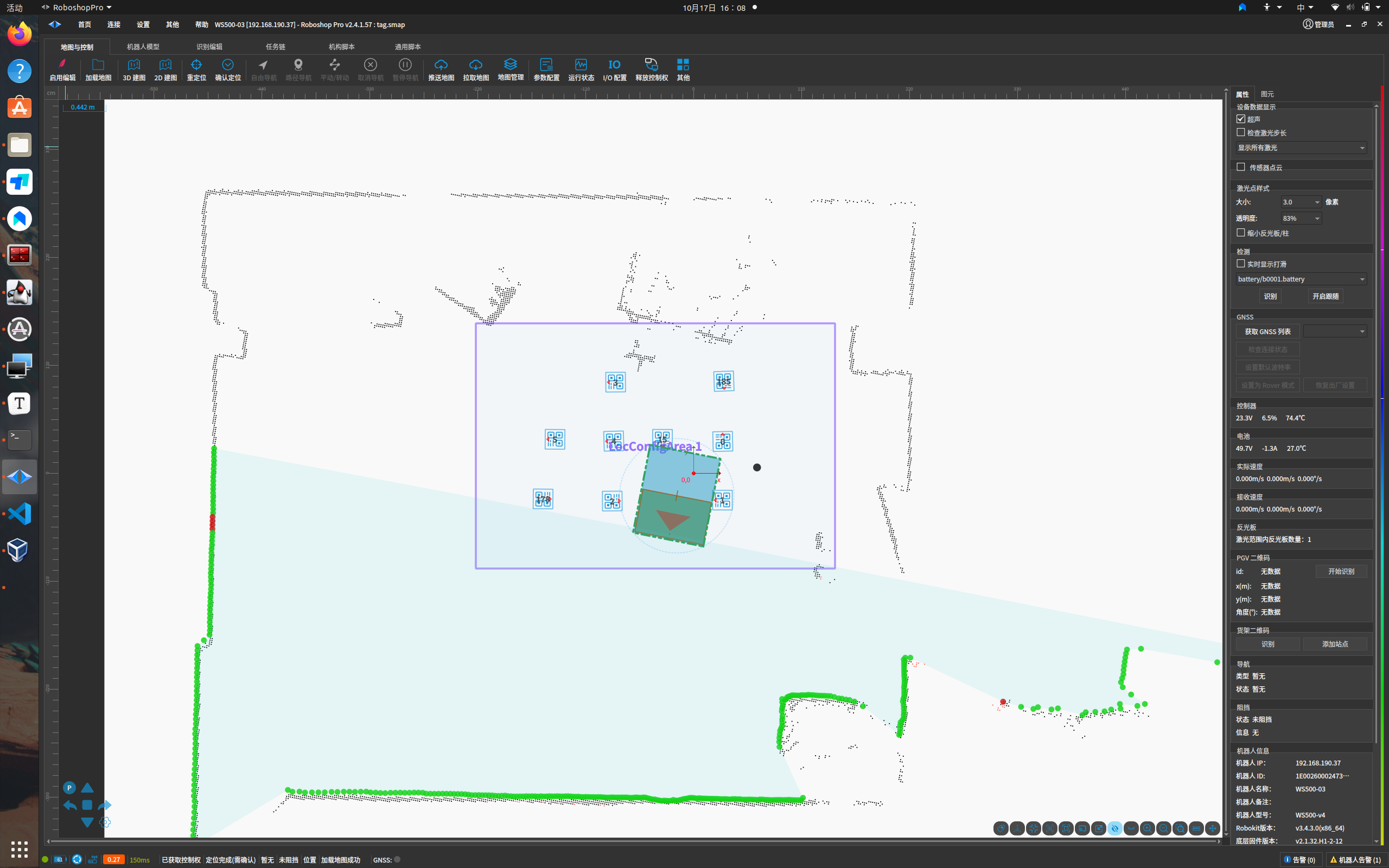


最近更新 2023/09/22

 感谢反馈
感谢反馈有帮助

 感谢反馈
感谢反馈没帮助
文章内容
一,2D激光地图创建
二,天花板二维码地图生成
2.1 开启天花板二维码建图功能
2.2 天花板二维码建图功能注意事项
三,天花板二维码地图和激光地图融合
3.1. 配置融合地图的SEERTAG定位区域
3.2. 推送使用地图



