







帮助中心主页



智造资源库















通识
网络设备
激光
导航激光
驱动器
步科
读码相机
3D相机
埃瓦 R50
奥比中光 Mini S
大疆 Livox Mid-70
串口服务器
复合机器人末端设备
电池
SRC-2000(S) 控制器电池适配说明
SRC-2000(S) 控制器电池适配说明
I/O类传感器
IO 扩展
称重传感器
货叉压力传感器
银牛R132网口版
一、适用范围
本文档针对银牛R132网口版避障相机的配置方法进行说明。
二、调试资源
3D数模:
R132 M12航插版.zip
产品规格书:
R132工业版规格书-Preliminary.pdf
外形图片如下: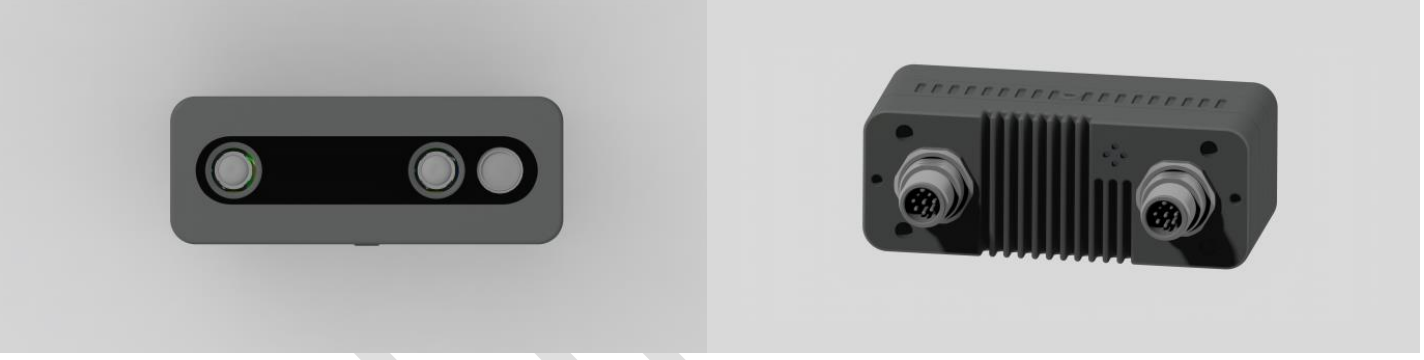
三、参数配置
1. 相机IP参数配置
首先需要一台电脑与银牛相机通过网线连接。根据电脑的操作系统选择对应的相机IP配置方式:
windows 系统
首先下载银牛IP地址修改工具
inu_iptool.zip
确保电脑网段和相机网段处于同一网段: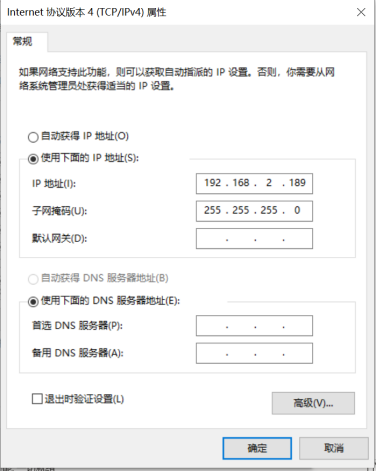
打开InuChip IP tool: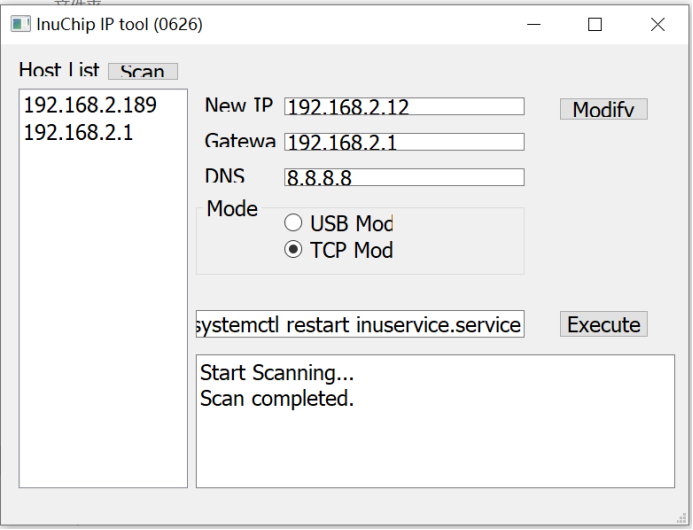
点击Scan,可以扫描出当前网络上的设备,192.168.2.1即相机设备。
在New IP中填写新的IP为192.168.192.*网段,点击Modify即可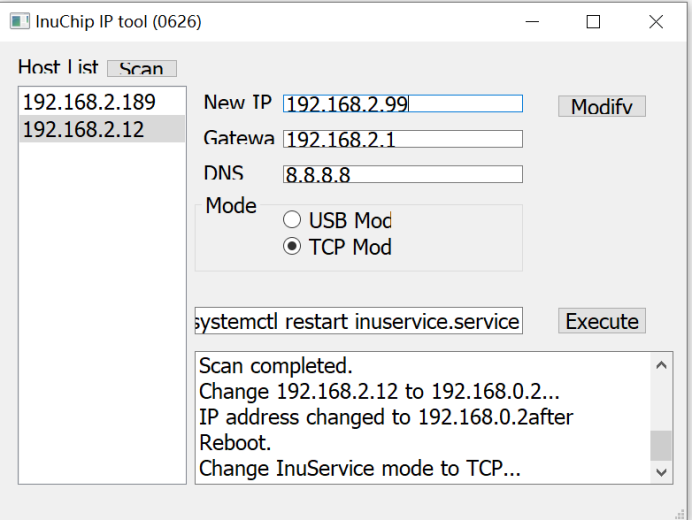
点击Hosts可以修改扫描网段: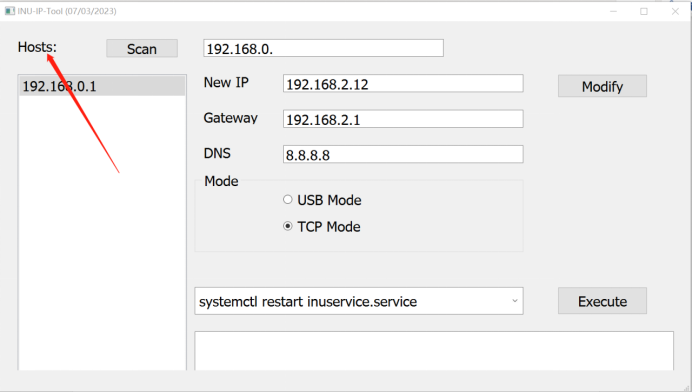
linux / windows 系统
确保主控网络和银牛设备网络在同一网段 :
银牛R132网口版设备的默认网络IP为192.168.2.1,电脑与相机直连需要把将 电脑 IP 类型设置为静态 IP,IP 地址为 192.168.2.188,子网掩码为 255.255.255.0。
bash
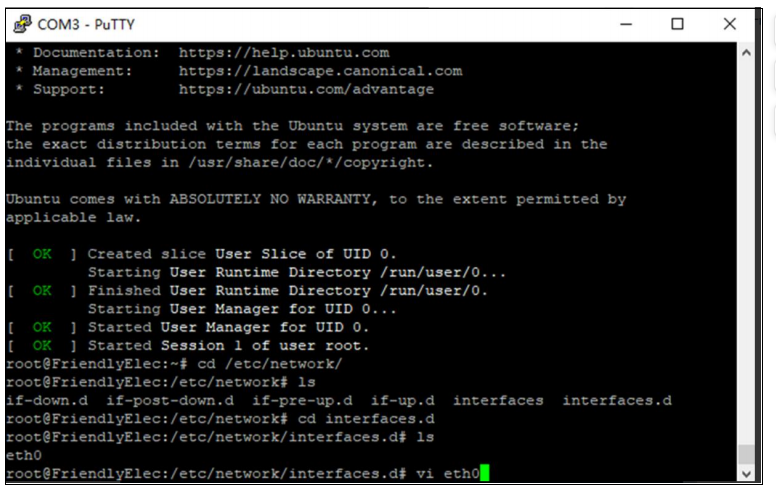
#登录银牛设备
ssh root@192.168.2.1 密码:fa
# 打开银牛静态IP配置文件
cd /ect/network/interfaces.d/ vi eth0
1
2
3
4
2
3
4
打开之后看到的文件内容如下图所示,将图中的192.168.2.1改为192.168.192.* 网段。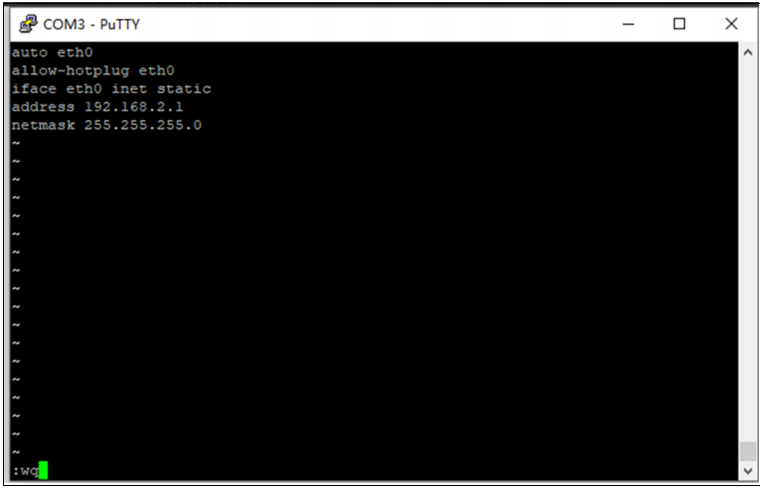
bash
#启用修改
sudo /etc/init.d/networking restart
1
2
2
2. Roboshop 配置使用
在模型文件 Camera 中选择相机类型为 INU-R132-TCP,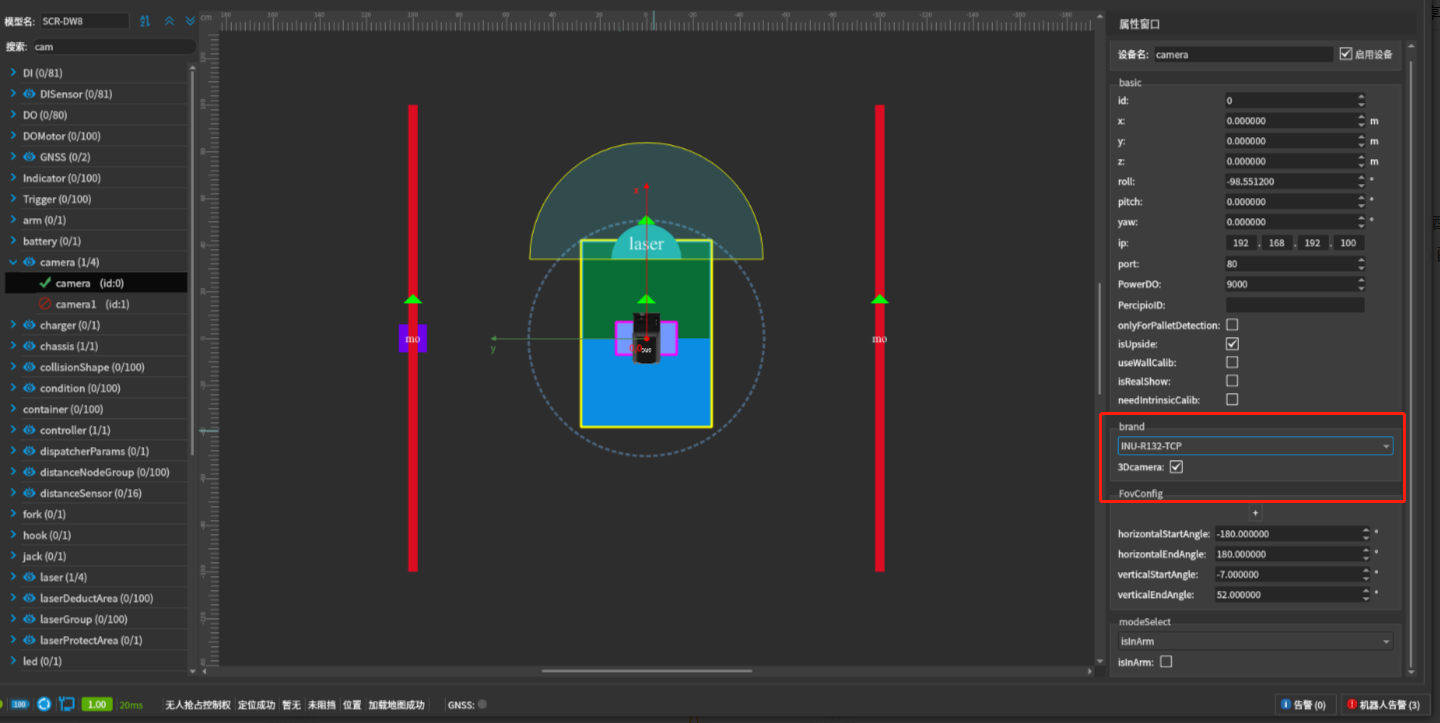
在roboshop配置界面中,在brand选择INU-R132-TCP型号,ip根据上面配置按实际填写。
在用作避障的时候,参数onlyForPalletDetection应不勾选。


最近更新 2023/11/14

 感谢反馈
感谢反馈有帮助

 感谢反馈
感谢反馈没帮助



