







帮助中心主页



Robokit 功能文档















移动机器人通识
底盘类型
地图构建及定位
识别
条形码识别
复合机器人识别
3D 相机识别
料笼形状识别
栈板形状识别(基于3D相机)
2D 激光识别
标定
标定类型
手动标定项
导航
机构脚本
机构脚本编程规范
导航
打滑检测
机构脚本接口字典
清洁机器人
辊筒车
功能授权
附录
参数及报警码
避障激光标定
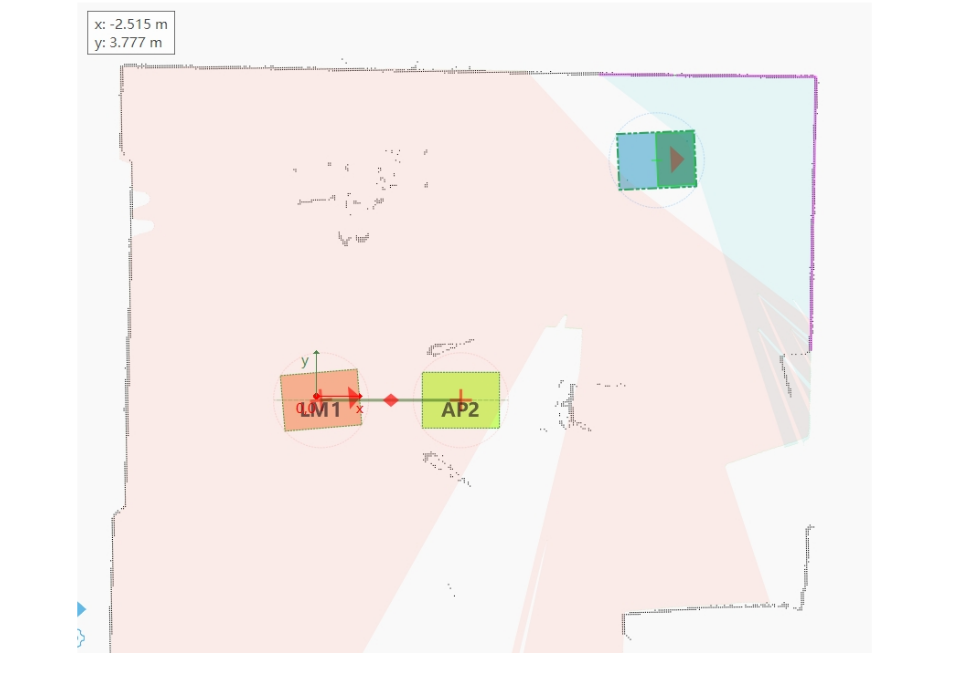
1.使用roboshop在地图中画线特征,并确定当前机器人定位的准确的,为了确保画的线特征是正确的,把小车开到墙角处,并使画的线段尽可能的和导航激光点重合。如下图所示:
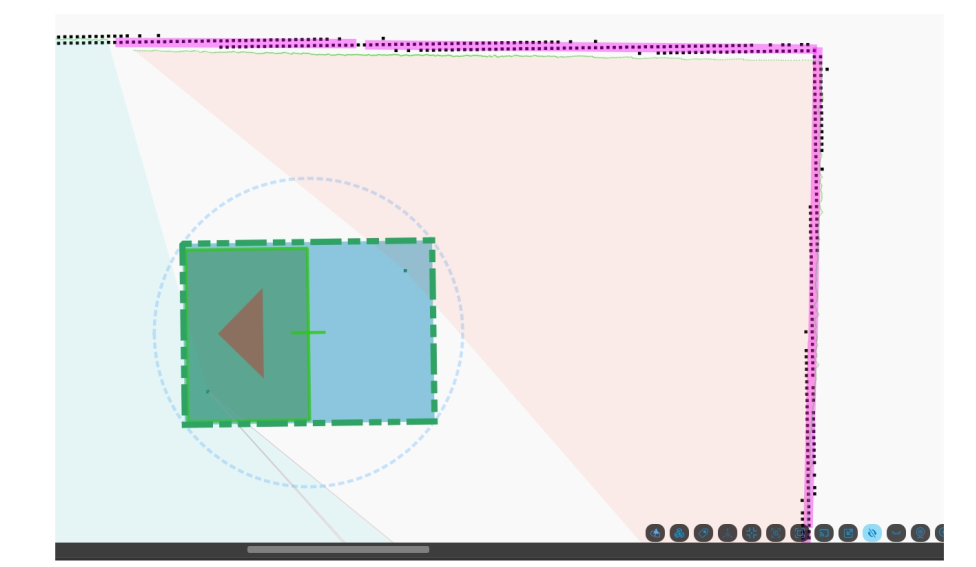
- 旋转机器人使标定雷达对准画的线特征,如下图所示,注意标定雷达给定的初始安装位置(即roboshop模型文件中雷达的x,y,yaw)不要有太大的误差。
3.确定前两步完成,点击roboshop中的标定机器人,选择要标定的雷达,开始标定即可:
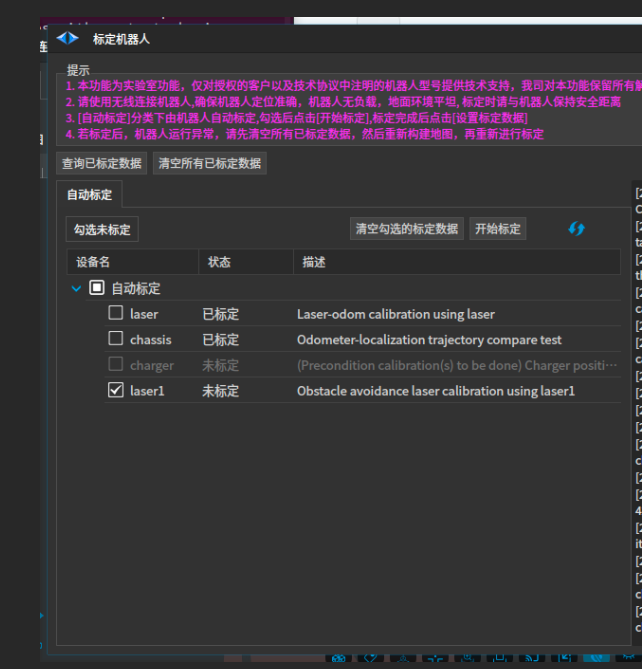
4.设定标定参数并查看标定结果即可。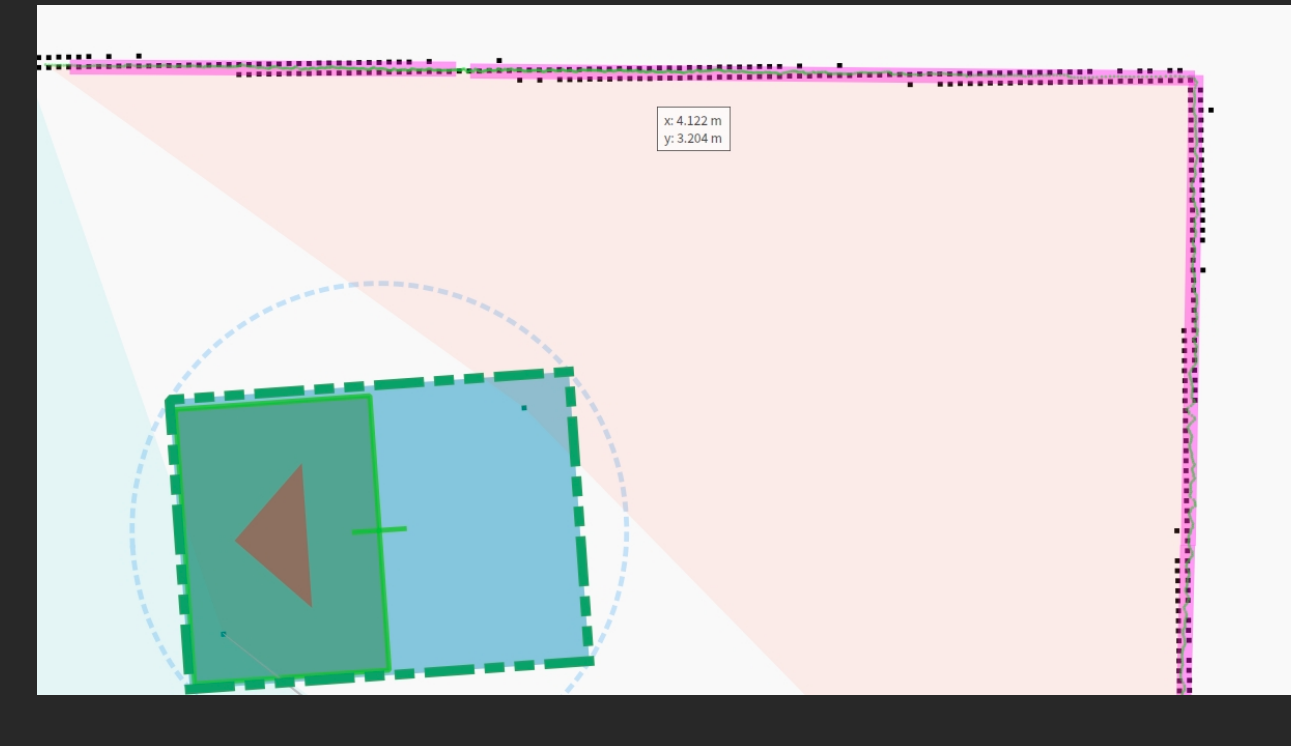
避障雷达标定注意事项:
1.标定前使用重定位功能确定当前定位的位姿是准确的。
2.线特征要能覆盖所标定的雷达点云。
3.目前的避障雷达标定,对初值敏感,尤其是角度,如果角度一直标的不正确需要手动调节一下角度,再进行标定。


最近更新 2023/12/01

 感谢反馈
感谢反馈有帮助

 感谢反馈
感谢反馈没帮助



