























前提:
在进行调试前,先仔细阅读 PGV二维码说明。
一、适用范围
- 型号:
GLS100G - 供电:
24V - 读码高度:
100mm(± 10mm)
二、调试资源
2.1 支持二维码类型
sick二维码生成工具生成:sick二维码生成器
2.2 读码相机手册:
Set-up Instruction GLS1_V3.pdf
operating_instructions_gls_zh_im0097019.pdf
2.3 读码相机调试上位机:
上位机(首次启用需要加载SDD文件):
SOPAS_Engineering_Tool_DC0010900.EXESDD文件:
SICK_GLS1_V1.0.0_20210420.sdd
该款设备在静止时可能会存在数据跳动的现象,数据变化范围在±0.1mm,角度在±0.5°
2.4 底层固件版本:
SRC底层固件使用2.1.20以上版本
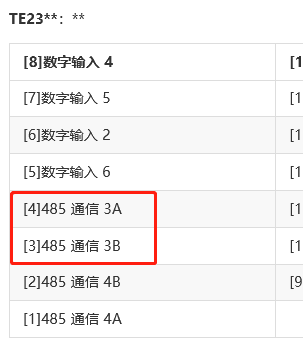
三、串口接线方式
sick支持配置设备地址,所以一个串口总线可接多个设备;串口接【485通信3】
四 、读码相机参数配置
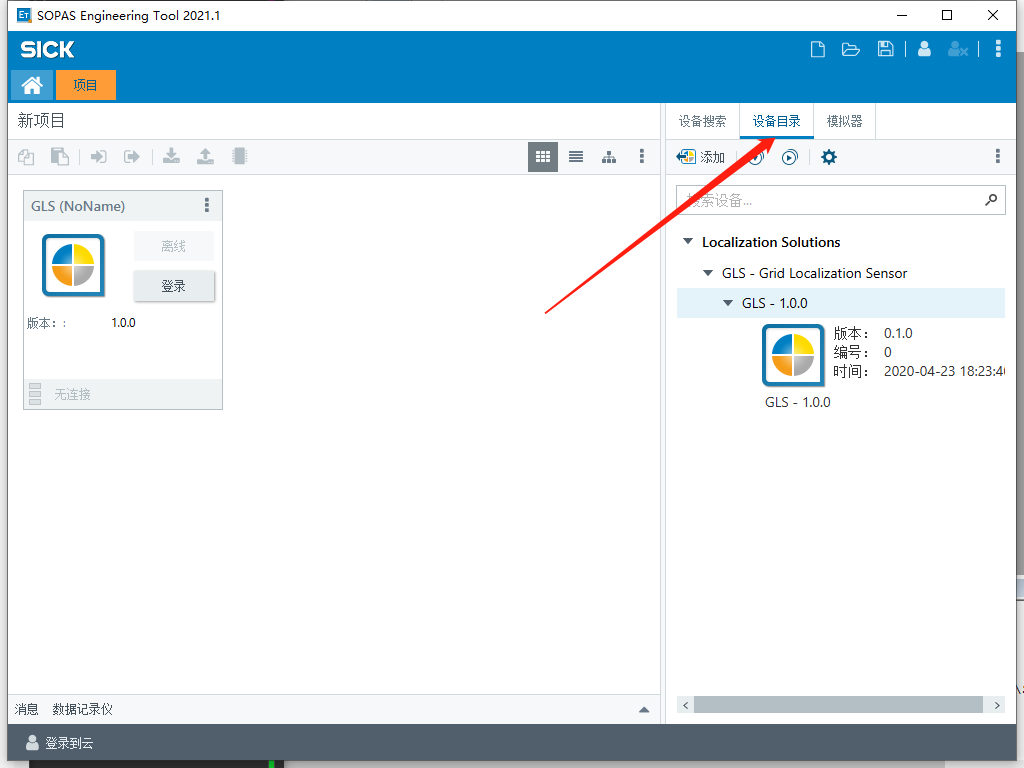
4.1 设备通信连接
使用mini-USB连接Sick的连接器,另一端连读码相机

如果找不到设备,可从设备目录中添加
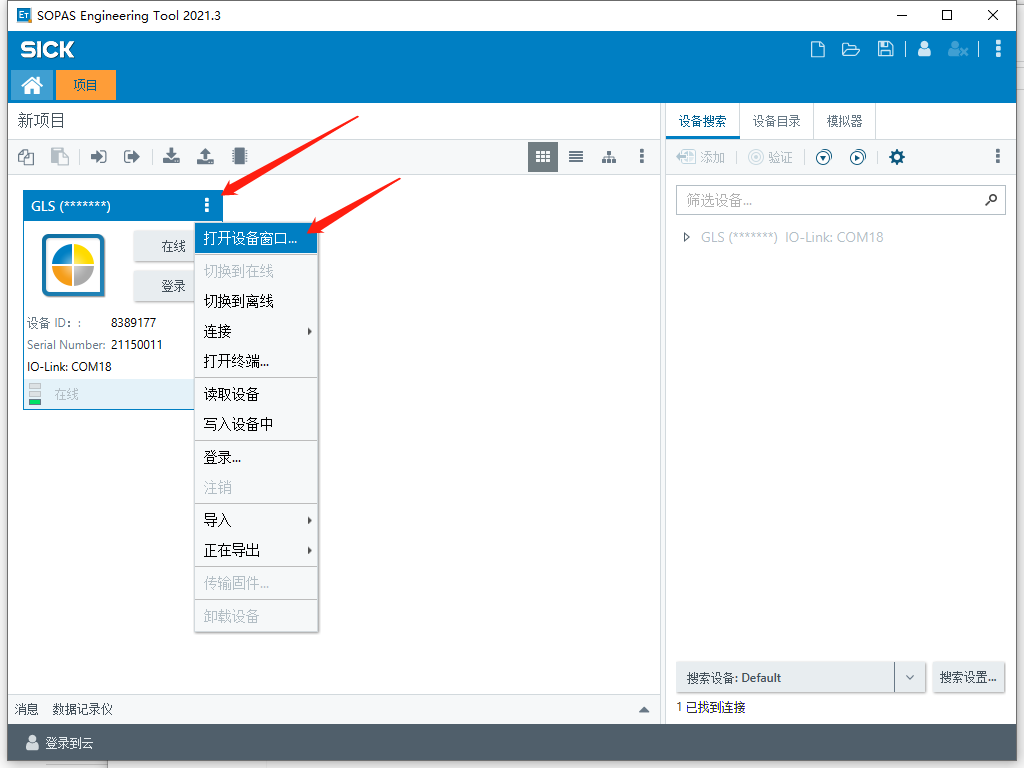
4.2 连接上位机
使用读码相机上位机连接设备,打开设备窗口

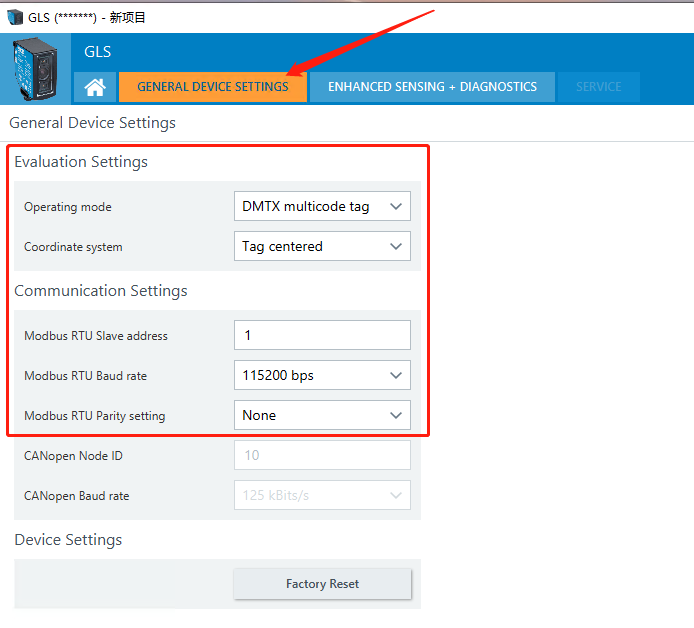
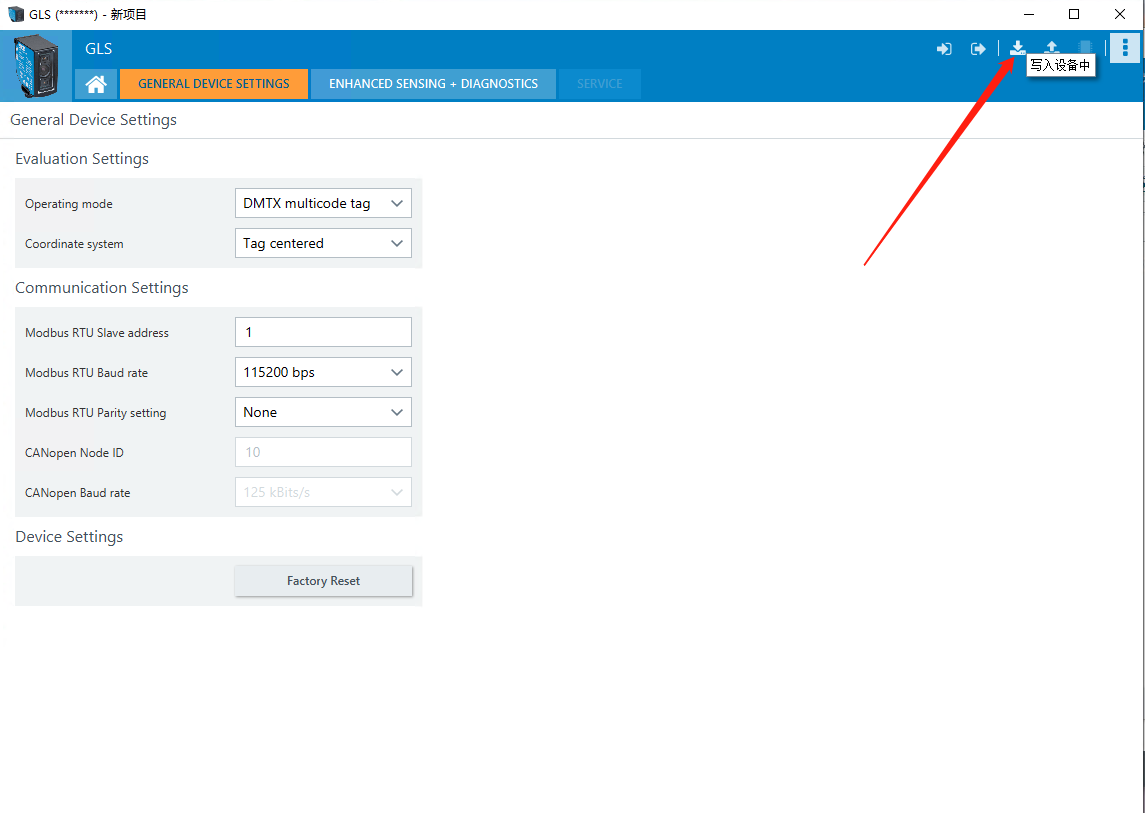
4.3 参数设置
设置读二维码模式:多码
反馈坐标系:code
ID:按需设置,和模型文件所配ID保持一致
波特率:115200
校验位:无校验
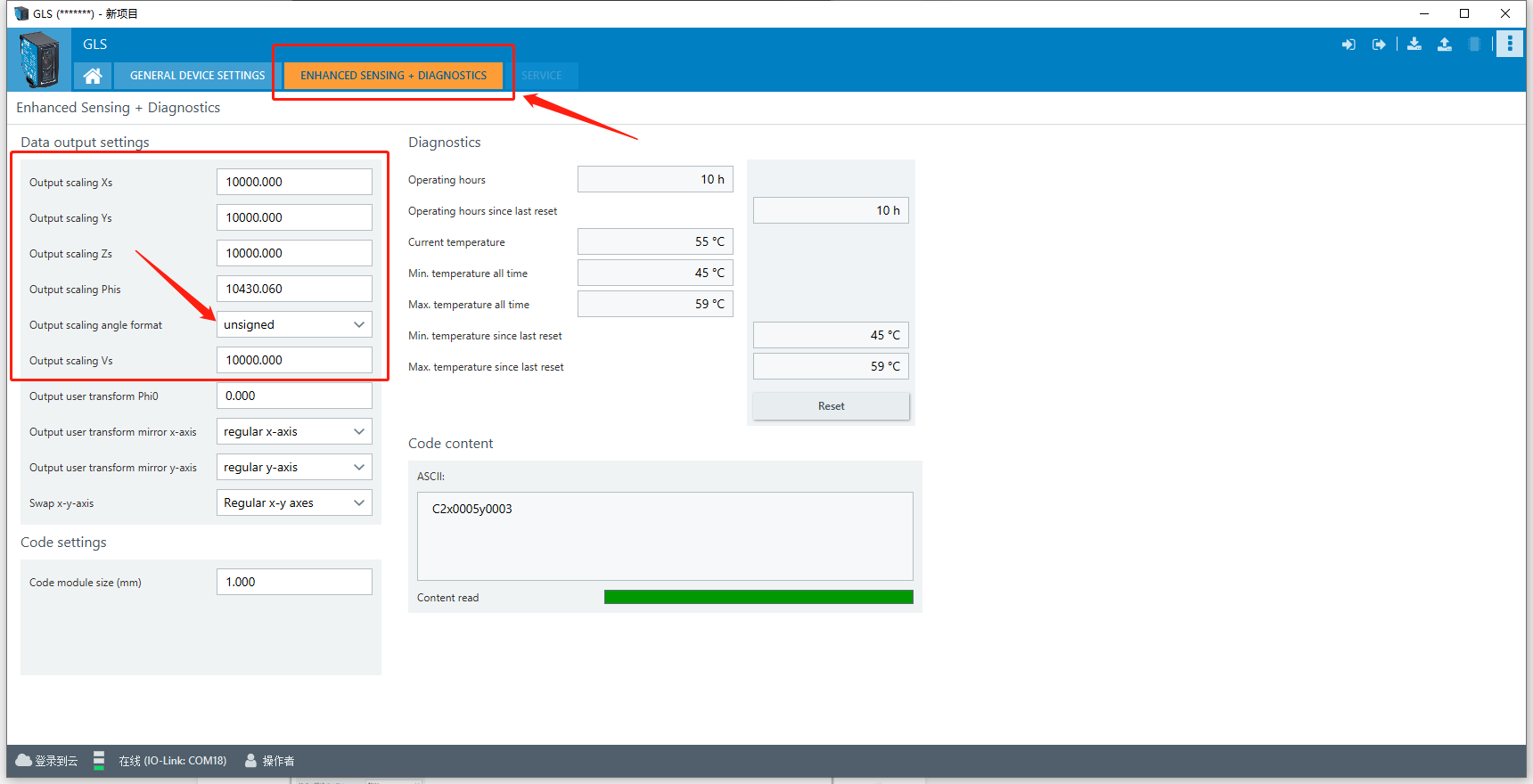
4.4 读码相机输出数据校准
正确后配置读码相机参数后,可从首页看到设备反馈数据,上位机读到的z值,是读码相机镜头到二维码的距离,在保证二维码平整的前提下,如果z值与实际值不符,读码相机反馈的数据会存在跳动的情况,此时需要调整分辨率: code module size
z值比实际值大,适当调小 code module size
z值比实际值小,适当调大 code module size
直至z值与实际值相近


4.5 参数下载
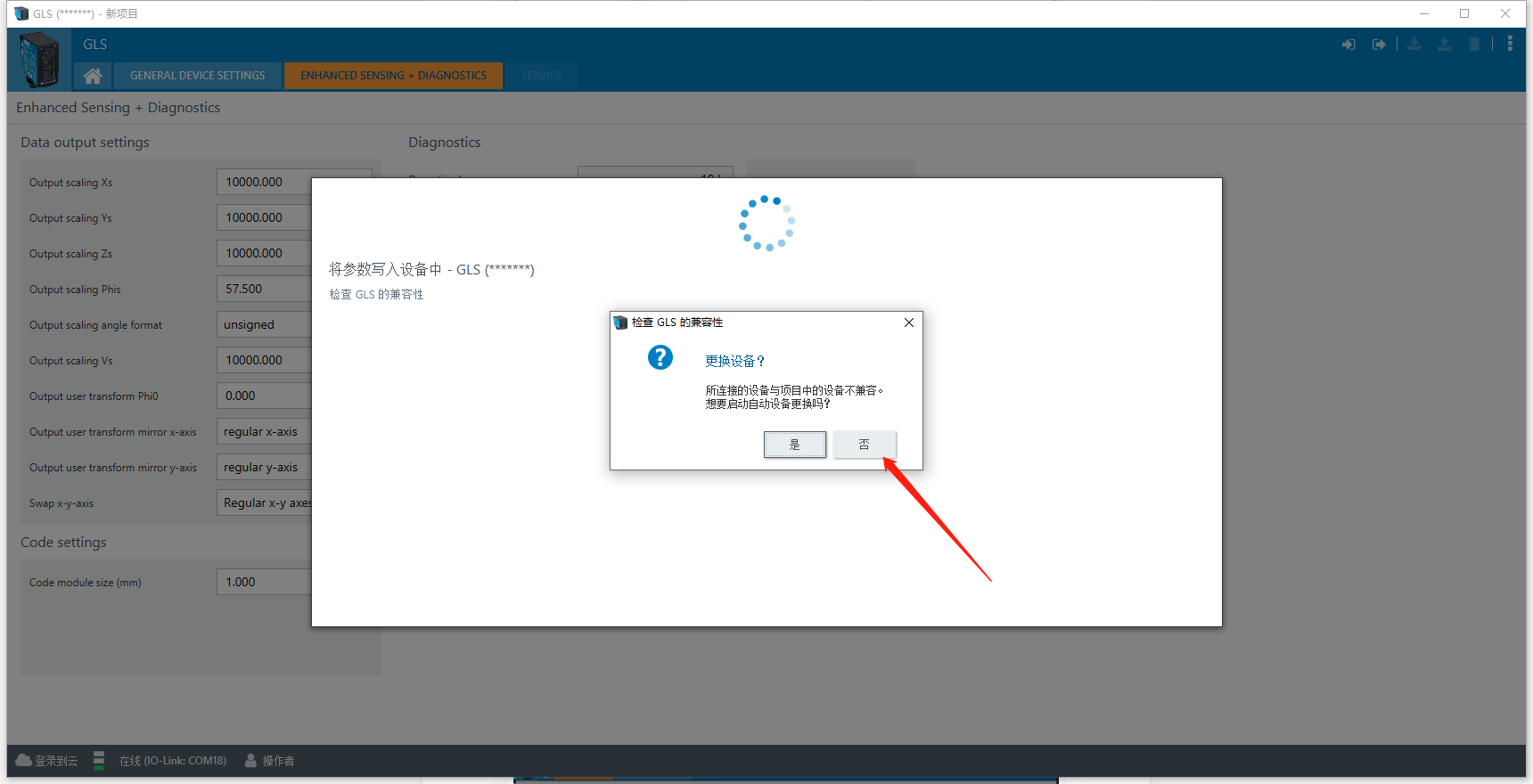
修改完成后,点击下载参数
如果弹出如下窗口选择【否】
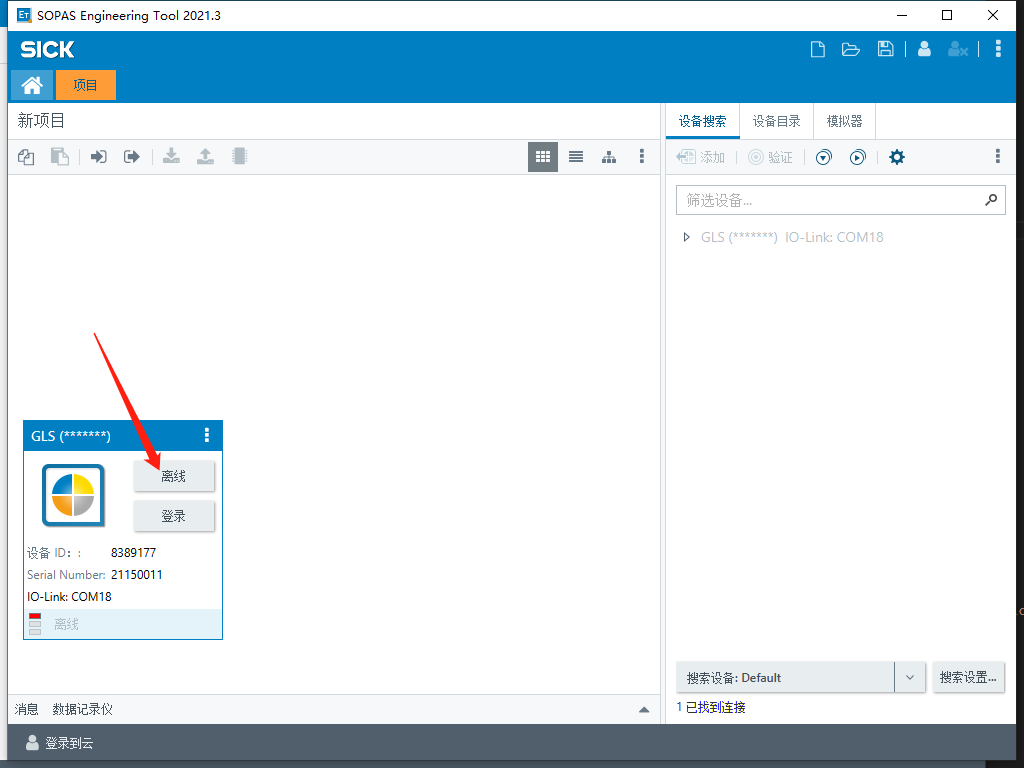
如果弹出写入失败,选择确定

把设备切换到在线状态
切换为在线状态后,选择读取参数
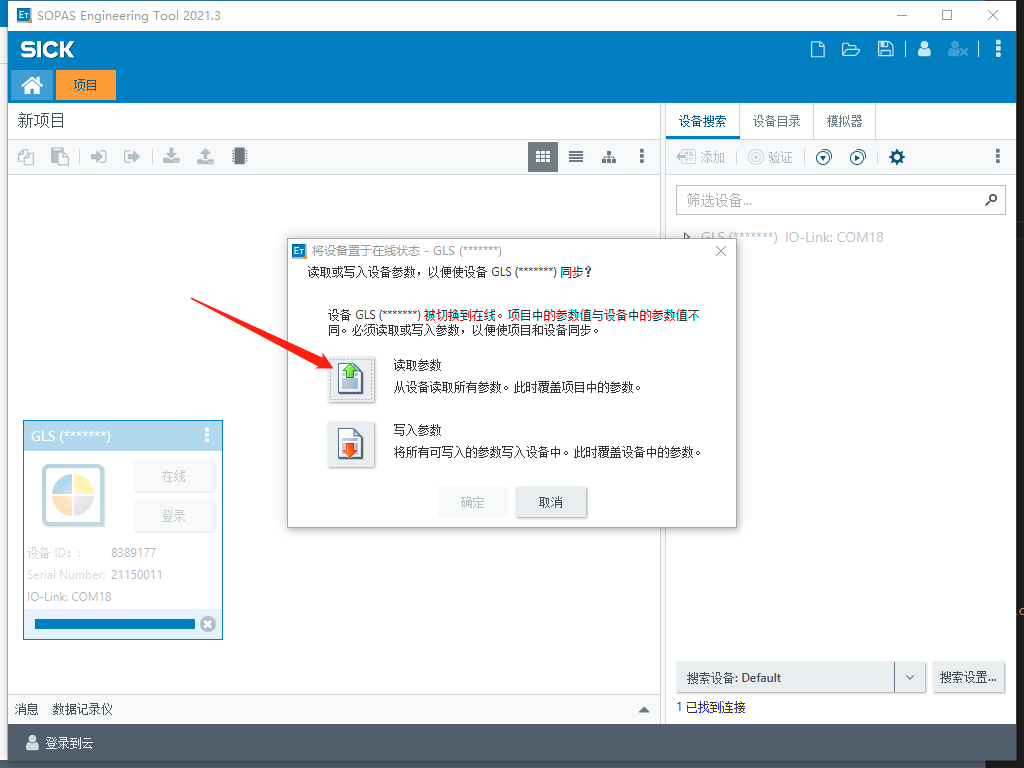
读取参数成功后,关闭上一个设备窗口,重新打开新连接的设备窗口,检查参数是否修改成功
4.6 设备重上电
设备重上电后参数生效,重上电后再次检查参数是否生效,防止参数修改失败
五、 模型配置
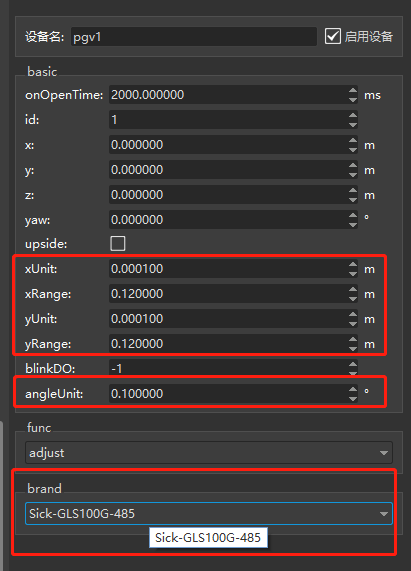
不论上视下视,id从1开始配,并且模型文件ID与设备ID对应
| Key | Description | Value | Unit |
|---|---|---|---|
| onOpenTime | |||
| id | |||
| x | 在x轴位置 | 右手坐标系下的 x 位置,如小车模型中坐标 | m |
| y | 在y轴位置 | 右手坐标系下的 y 位置,如小车模型中坐标 | m |
| z | 在z轴位置 | 右手坐标系下的 z 位置,如小车模型中坐标 | m |
| yaw | 安装角度 | 右手坐标系下朝向角,如小车模型中坐标 | ° |
| upside | |||
| xUnit | x单位 | 读码相机 返回 X 数值单位,换算为 m 需要乘的系数;可通过查看 读码相机 使用说明书方式获得 | m |
| xRange | X 方向范围 | 读码相机 能看到的 X 方向的范围,单位为 m,请根据实际情况进行填写 | ° |
| xUnit | y单位 | 读码相机 返回 Y 数值单位,换算为 m 需要乘的系数;可通过查看 读码相机 使用说明书方式获得 | |
| yRange | Y 方向范围 | 读码相机 能看到的 Y 方向的范围,单位为 m,请根据实际情况进行填写 | |
| blinkDO | |||
| angleUnit | 角度单位 | 读码相机 返回角度信息的单位,换算为"°"时的单位 | |
| brand | 品牌名称 | 已适配可选用品牌 |
六、测试
七、常见问题



 感谢反馈
感谢反馈
 感谢反馈
感谢反馈


