























当相机内参标定完成后,既可以进行相机外参标定,由于红外相机的视野有限,在一幅图像中仅能出现一个或者两个二维码,而目前非差动机器人进行标定需要较大的区域的运动进行轨迹对齐。因此相机与车体的标定需要在贴满多个二维码的天花板场景中进行。
一,标定环境
其中标定区域是场景中的一个特殊区域,该区域可以为标定进行独立设置。该区域也可以与运行场景复用,当复用时,该区域的二维码的ID号码与运行场景中的ID号码保持连续。
标定区域中的二维码排布尽量以3*3矩阵的形式排布,每两个二维码之间的距离不超过1米。如图1所示,按不同车型的所需的标定轨迹大小进行合理位置排布。基本要求为:在标定的运动过程中要看到一个或者多个二维码。进而提供准确的标定结果。码之间的距离和排布关系并不一定严格按照图1所示的规则,在场景要求的合理范围内,进行自定义排列均可。
对于双轮差速等运动模式,相机标定时可以调整运动半径和运动速度,在合适的高度下,即使只使用一个二维码即可完成相机外参标定。对于叉车,多舵轮车等运动机构,则需要首先建立多个二维组成的码地图,然后进行外参标定功能。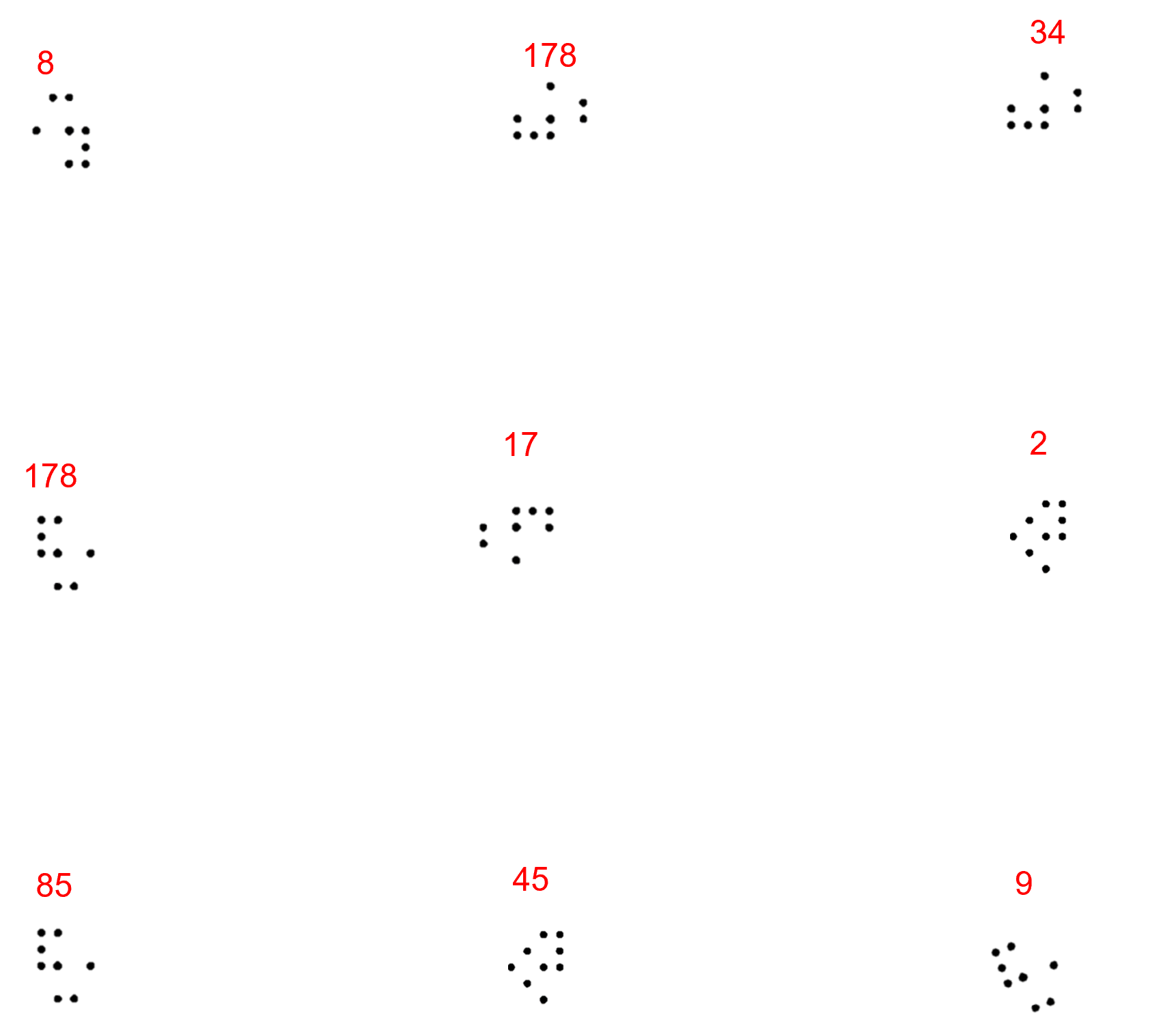
图1 红外相机与车体标定使用的天花板二维码排布位置
二,RoboShop标定工具使用
2.1 二维码地图构建及地图导入
首先在RoboShop选择二维码建图工具,点击开始识别。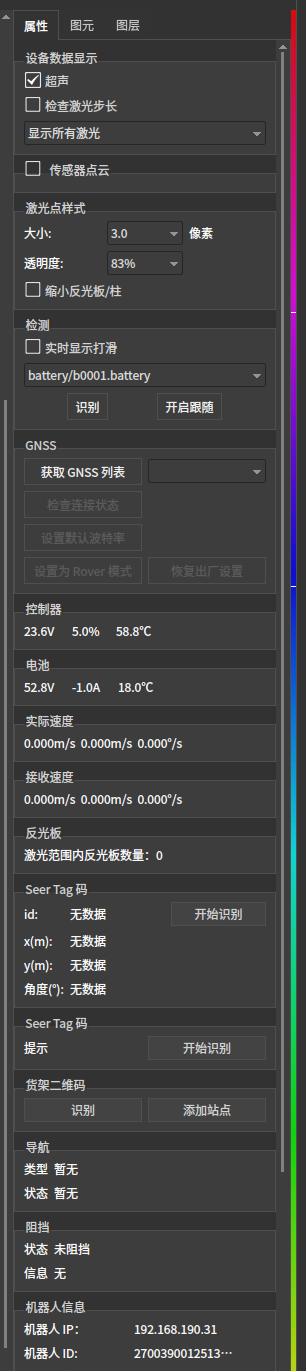
开始进行二维码地图创建时,控制车辆在二维码底下进行运动,运动按照不同的方式进行,为保证地图精度,要尽量保证对于每一个二维码都有多个不同位置的信息录入。创建完成后,打开创建的地图并根据地图中二维码的空间位置与实际位置进行对比,确定地图中是否有明显的丢失,重叠,混乱等,判断地图的有效性。
当相机的外参已经标定完成,因为各种原因需要重新标定时,需要在标定机器人功能中清空当前的相机标定参数,然后进行重新标定。
- 首先进行地图创建并进行地图编辑,点击启用编辑
 图2 编辑地图
图2 编辑地图
- 创建高级定位配置区域,并根据二维码场景配置相应的区域。
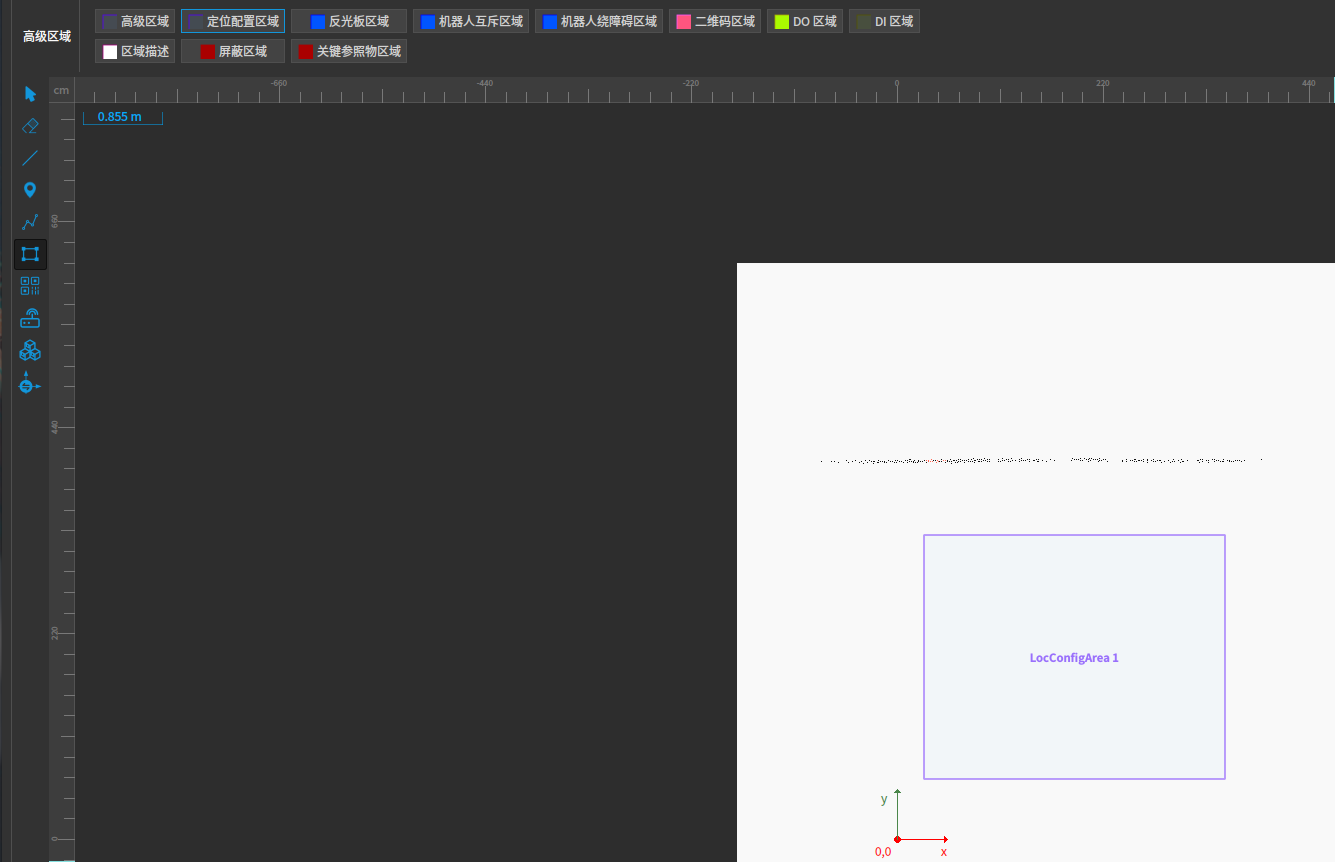 图3 创建高级定位配置区域
图3 创建高级定位配置区域
3. 选中use3DTag,开启此区域内的功能。表示该区域内天花板上包含一个或者多个定位的二维码进行辅助定位。只有配置use3DTag属性后,当机器人根据定位信息进入该区域后,便触发SEERTAG检测功能。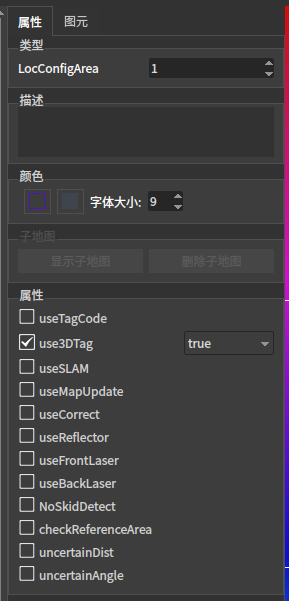
图4 配置高级定位配置区域选择3D标签定位
下图为正常的天花板二维码建图结果: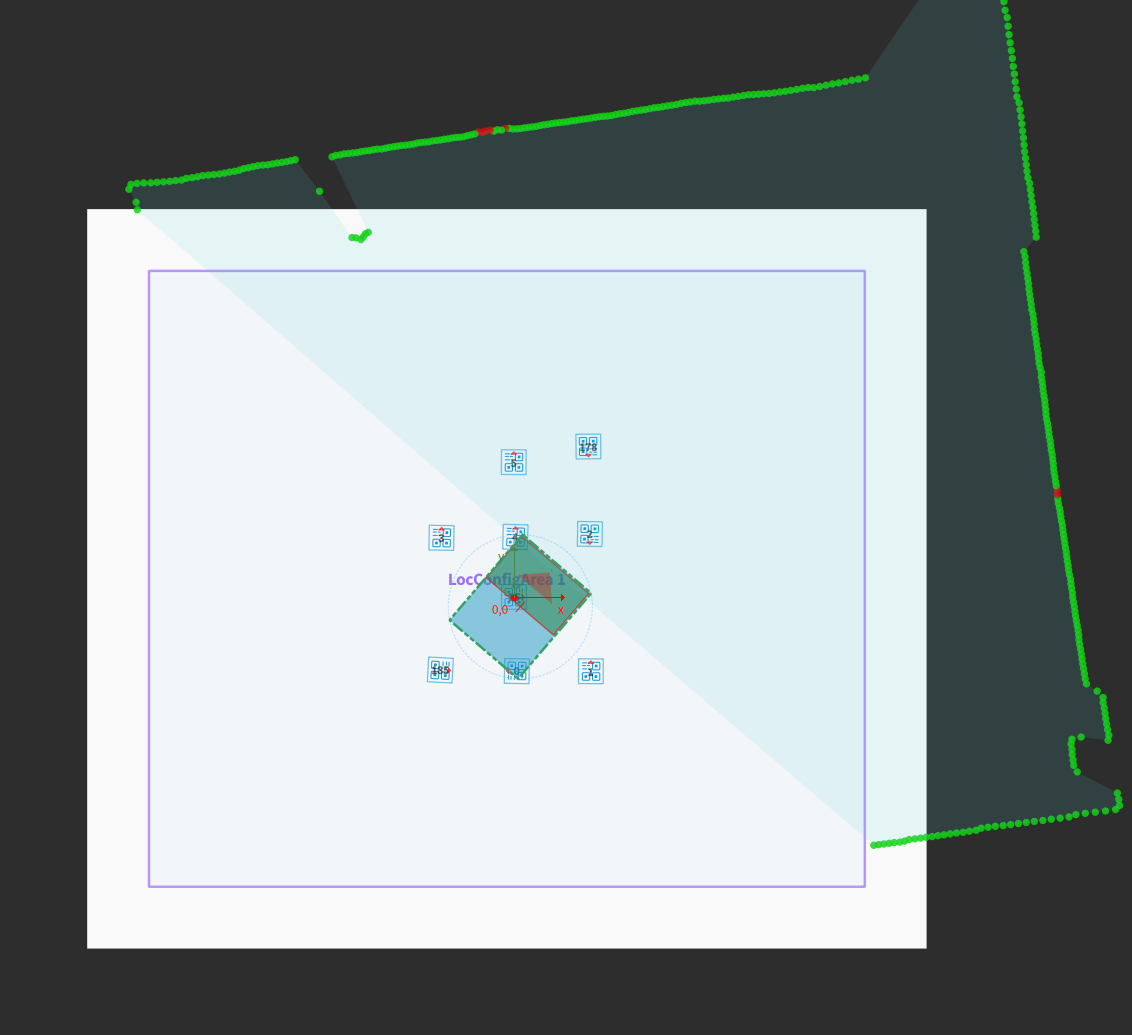
图5 RoboShop天花板二维码建图效果
3D视角如下所示:(如果相机标定准确,无明显畸变,则二维码图像处于一个标准平面上)
图6 天花板二维码建图效果及相机位姿展示
将创建的二维码地图推送到机器人中,触发机器人使用二维码定位功能,此时定位处于标定模式,在标定模式中,系统会记录二维码得到的计算姿态与当前里程计姿态。
局部二维码地图定位效果演示
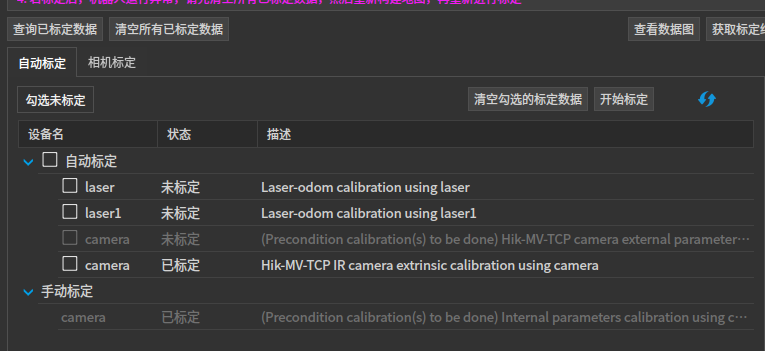
2.2 相机-里程计外参标定
进行相机和里程计外参标定时,机器人会按照设定的路径进行重复运动,其运动模式与机器人的运动结构有关。在标定时要保证机器人始终看到二维码。标定相关配置请参考激光-里程计标定环节。
激光-里程计标定
 双轮差速车辆标定的结果如下图所时:
双轮差速车辆标定的结果如下图所时: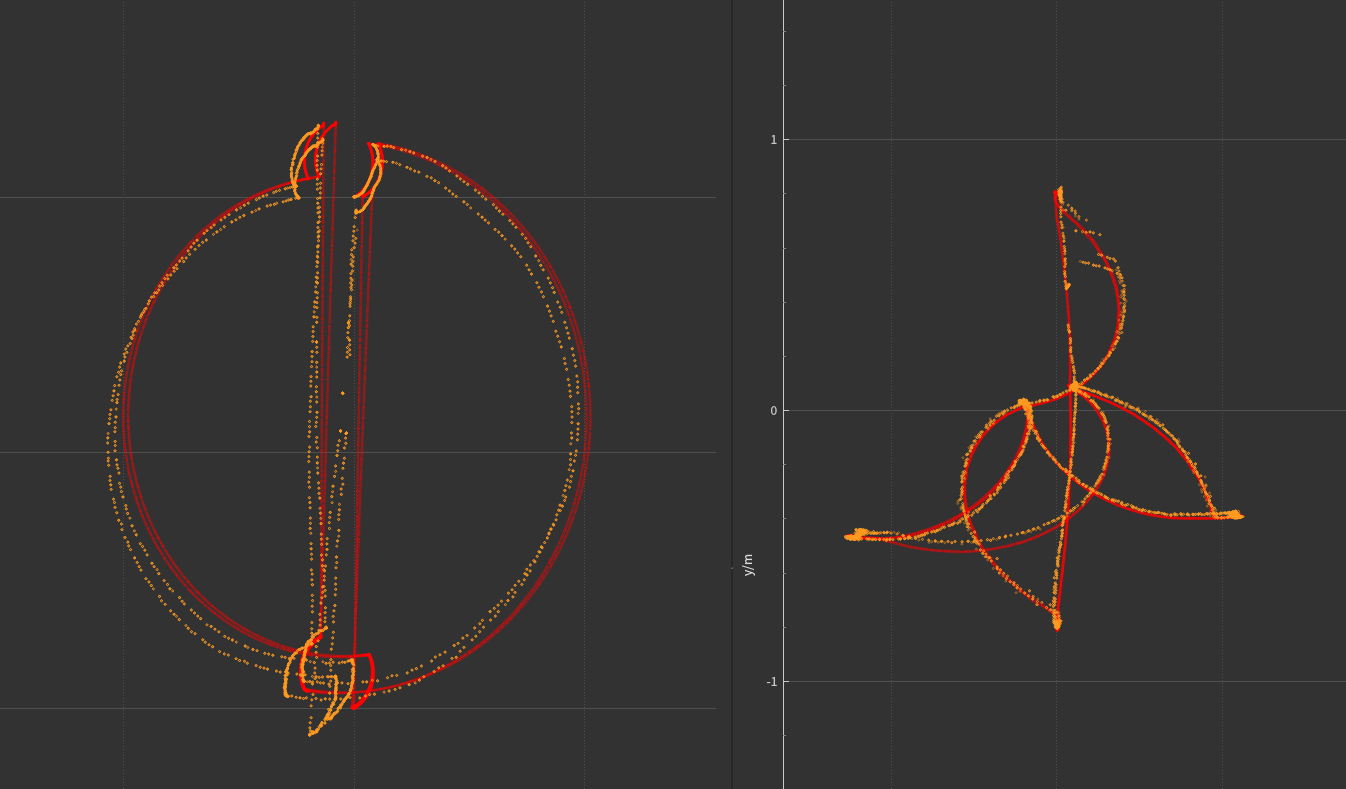
由于车体抖动和安装不规范,标定误差一般在4-5cm以内。
叉车标定结果如下图所示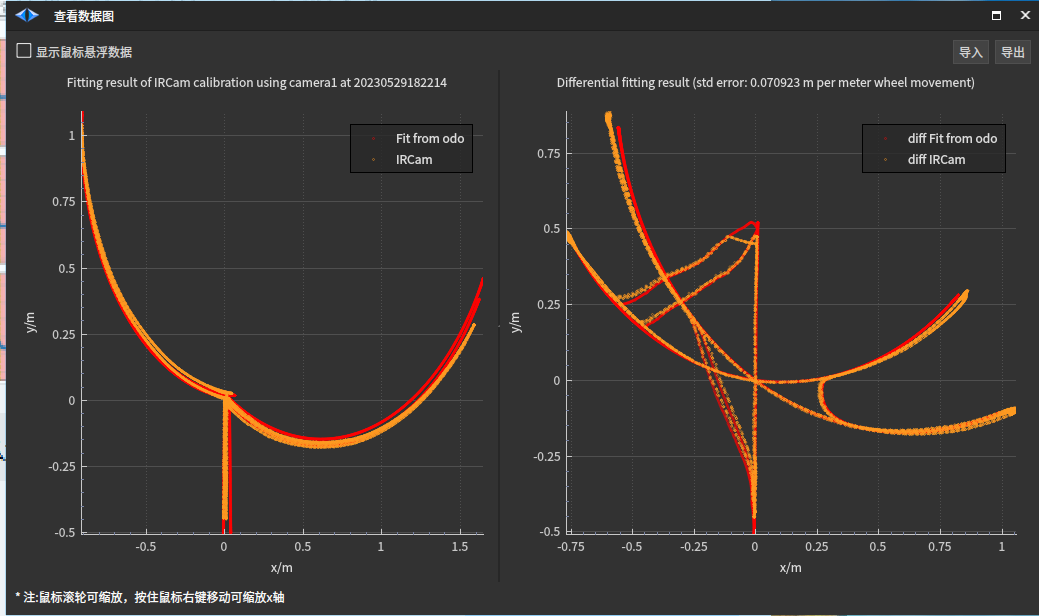 叉车标定中,标定误差一般在0.07左右。
叉车标定中,标定误差一般在0.07左右。



 感谢反馈
感谢反馈
 感谢反馈
感谢反馈


