修订版本 | 日期 | 描述 |
|---|---|---|
V1.0 | 2021.07 | 第一版 |
V2.0 | 2022.12 | 修改 3.1.3 中图片的指示灯描述(LTE) |
V2.1 | 2023.03 | 修改 IP 等级和编码器接口定义,去除 RS232 接口描述 |
V2.2 | 2023.05 | 更新结构尺寸图纸 |
V2.3 | 2023.10 | 更新 seer logo,编码器接口定义,和典型电气原理图 |
衷心感谢您的选购。
只有经过相应操作培训并取得资格的合格人员才允许使用本产品。
使用本产品制造移动机器人建议参考 ISO3691-4 规范。
通过本产品制造的移动机器人的使用及维护行为须符合 GB T 36507-2018 工业车辆使用、操作与维护安全规范。
免责声明
我们已核对过本文档的内容。但不能保证所描述的和产品完全一致,我们会经常检查说明的内容,并在后续的编辑中进行必要的更正。
技术数据如有改动,恕不另行通知。
温馨提示
产品使用前,务必请仔细阅读产品说明书。
非授权维修人员请勿将控制器拆开。
在使用前,请将控制器固定于稳固的平面上。
请保持控制器的干燥,避免机箱内的部件过热,请控制器固定在导热良好的底板上。
在将控制器与电源连接前,请确认电源电压值,以及电源端子的连接方式符合要求。
请将电源线置于不会被踩踏的地方,且不要在电源线上堆置任何物件。
当您需连接或拔除任何设备前,须确定所有的电源线事先已被拔掉。
请留意手册上提到的所有注意和警告事项。
设备在使用过程中出现异常情况,请找专业人员处理。
请不要将本设备置于或保存于环境温度高于 70℃ 以上的环境中,否则会对设备造成不可逆的伤害。
本文档不可替代技术协议,本文中的内容若与技术协议发生冲突,请以技术协议或合同说明为准。
本文档的最终解释权归属于上海仙工智能科技有限公司。
1 简介
1.1 产品介绍
本产品是为移动机器人(AGV、AMR 等)设计的功能安全控制器,安全完整性等级为 SIL2,可以搭建符合 ISO3691-4 标准的移动机器人,并提供了核心的地图构建、定位导航、模型编辑等功能。控制器适配多款主流的激光雷达,并提供丰富的 I/O、CAN、RS485、Ethernet 等接口,用于接入各种传感器和驱动器设备。本产品将移动机器人的核心组件集成于一体,配合功能强大的客户端软件,可帮助用户快速的完成安全型移动机器人的制造和应用。
本产品由上海仙工智能科技有限公司研发及制造,上海仙工智能科技有限公司 © 保留所有权利。
商标
下文的一些名称以及可能的其它名称不带注册商标符号 ®,它们均为上海仙工智能科技有限公司的注册商标:
仙工,SEER,SRC
认证
经 CE 与 ETL 认证,符合以下标准:
IEC-61508
ISO-13849-1
IEC-62061
EN 61010-1:2010
IEC 61326-1
UL 61010-1
CSA C22.2#61010-1-12
UL 61010-2-201
CSA C22.2#61010-2-201
47CFR Part 15(2020)
ANSI C63.4(2014)
1.2 功能总览
功能安全 | IEC 61508 SIL2 / IEC 62601 SIL2; ISO 13849-1 Cat.3 PLd |
|---|---|
开机模式 | 提供一键系统开关机接口 |
数字输入 | 提供 24 路隔离型数字输入接口 |
电源输出 | 提供 16 路可控电源输出接口 |
供电监测 | 监测系统供电电压、电池电量状况 |
电池管理 | 对有输出开关的电池,提供对应的电池开关管理端口 |
故障报警 | 提供用于指示报警状态的端口 |
急停转发 | 提供将一路急停输入转发为两路急停输出的功能 |
通讯总线 | 提供 RS485、CAN、USB 等多种通讯总线接口 |
姿态感应 | 内置六轴加速度传感器,可精确感知控制器姿态 |
温湿环境 | 内置温湿度传感器,有效感知控制器内环境 |
网络接口 | 集成 5 口千兆网路交换机以及 2.4/5GHz 双频 Wifi(工业级) |
1.3 产品尺寸及环境
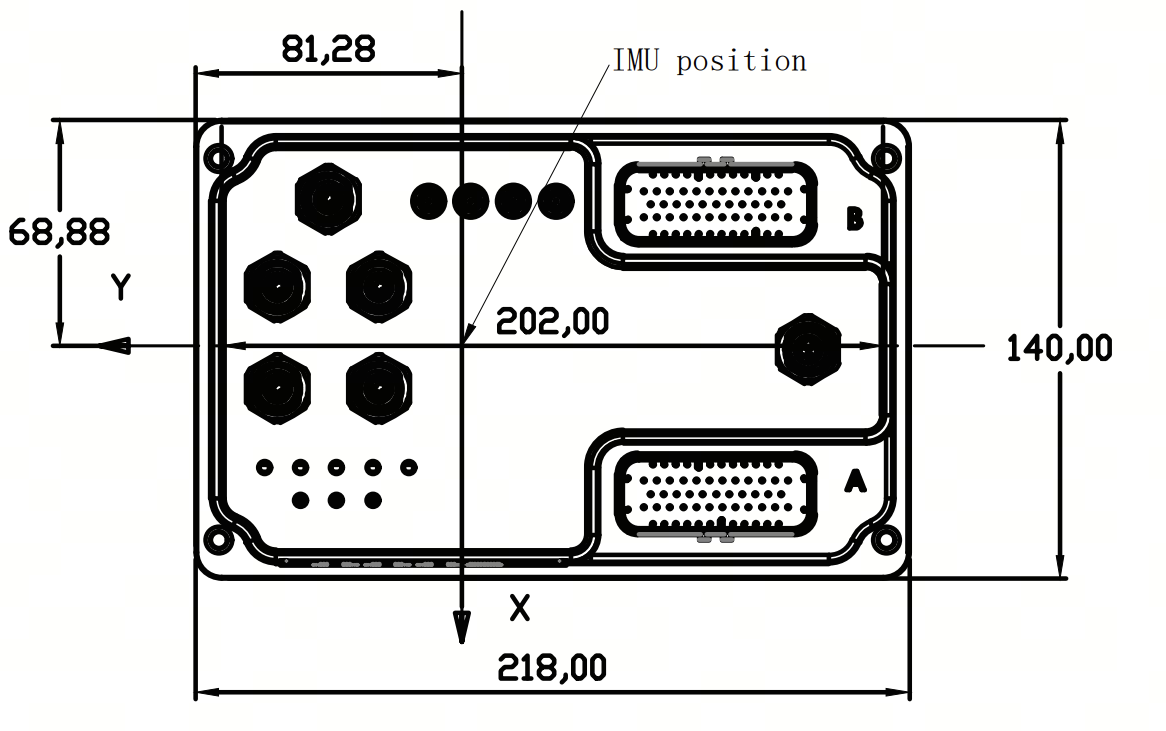
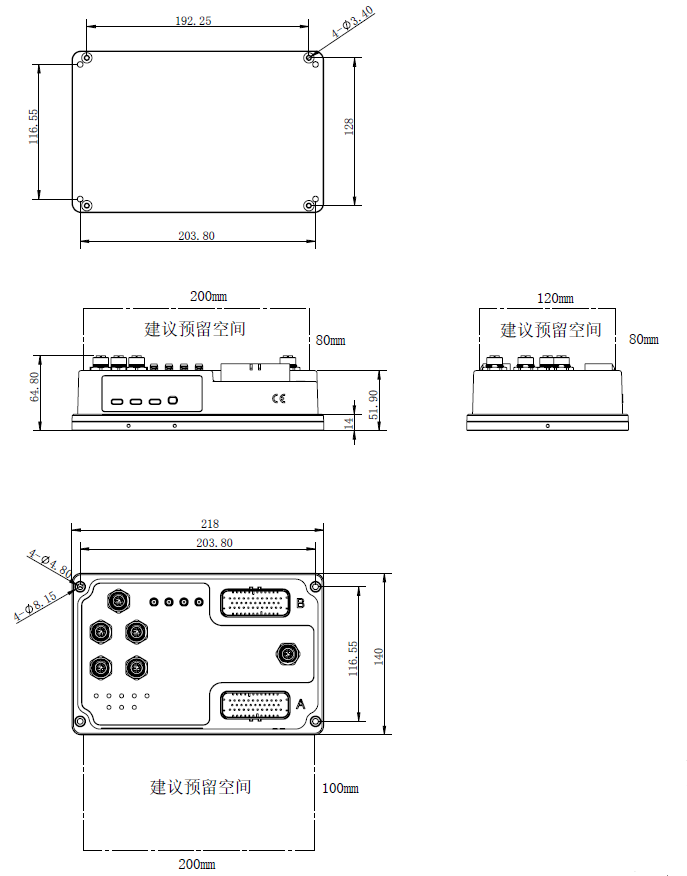
整机尺寸:218 x 140 x 64.8 mm
产品重量:1.5 Kg
工作温度:-30 ℃~55 ℃
工作湿度:10%~90% 相对湿度,无冷凝
贮存温度:-40 ℃~70 ℃
防护等级:IP52(IP65 需要定制外壳)
1.4 外部电源需求
电压 | 22 V~55 V |
|---|---|
纹波与噪声 | 150 mVpp |
整机功率 | 18 W(不含 Power DO 负载) |
2 尺寸及安装
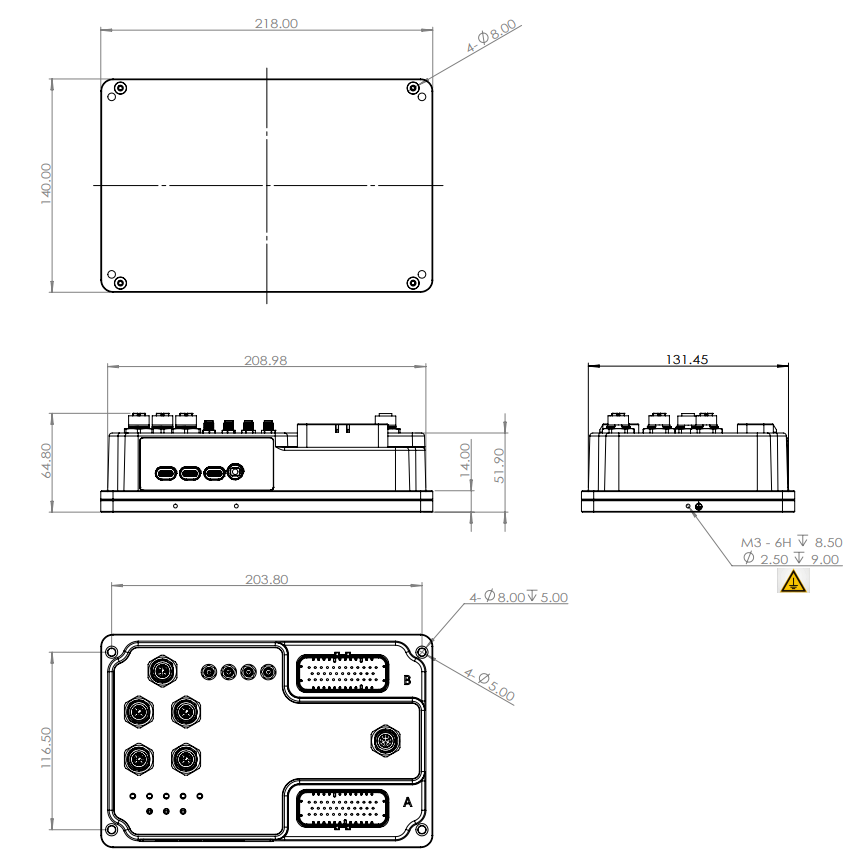
2.1 外观和尺寸图
尺寸图如下图:(单位:mm)
2.2 安装事项
2.2.1 安装方向
控制器的固定底板的安装面必须垂直于任意一个空间坐标系方向。
允许的摆放方向(其中 X,Y,Z 为空间坐标系方向):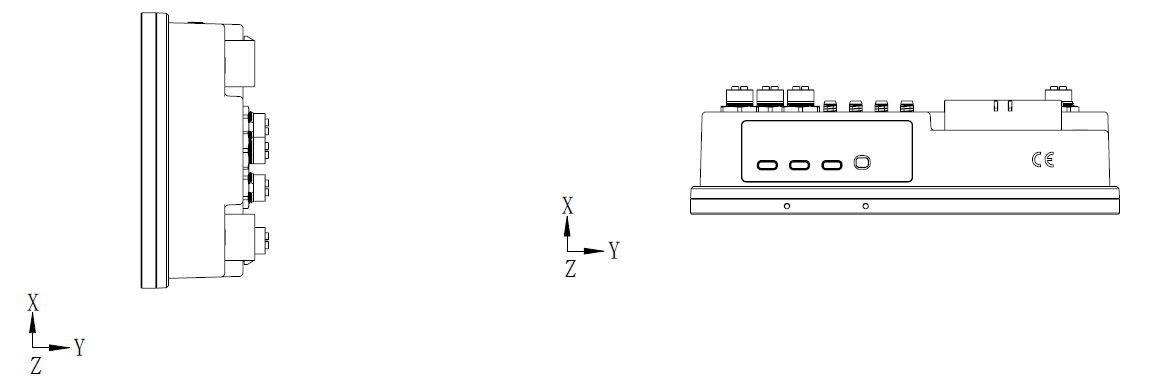
错误的摆放方向(其中 X, Y, Z 为空间坐标系方向):
2.2.2 陀螺仪坐标方向
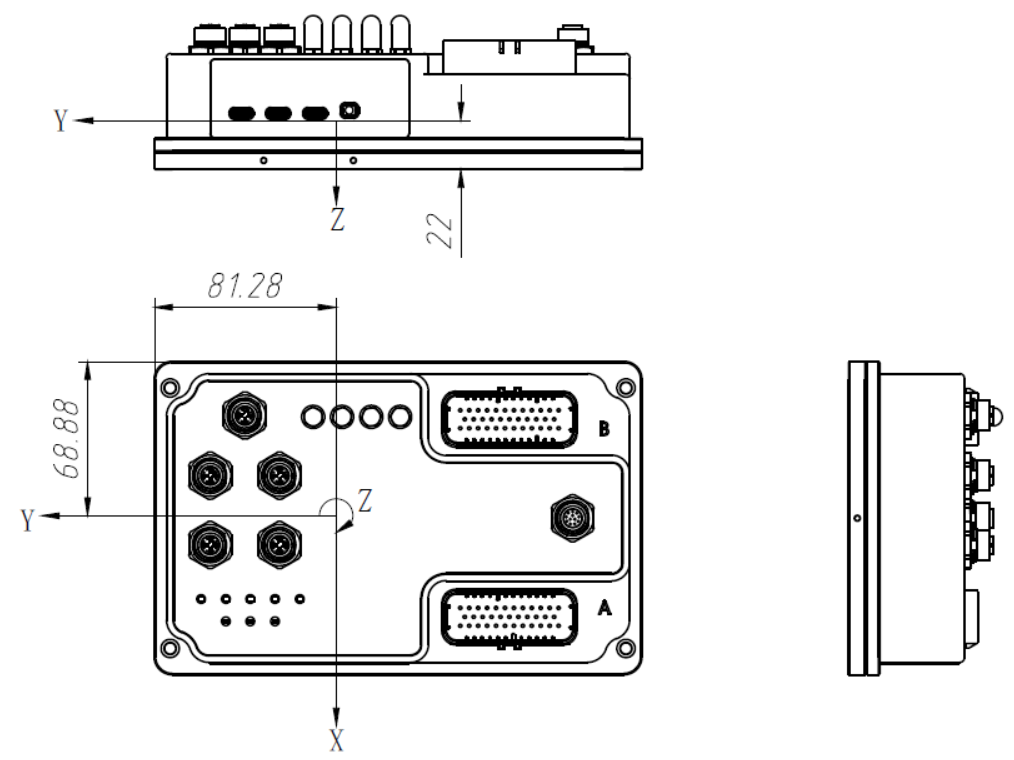
2.2.3 安装孔位
单位:mm
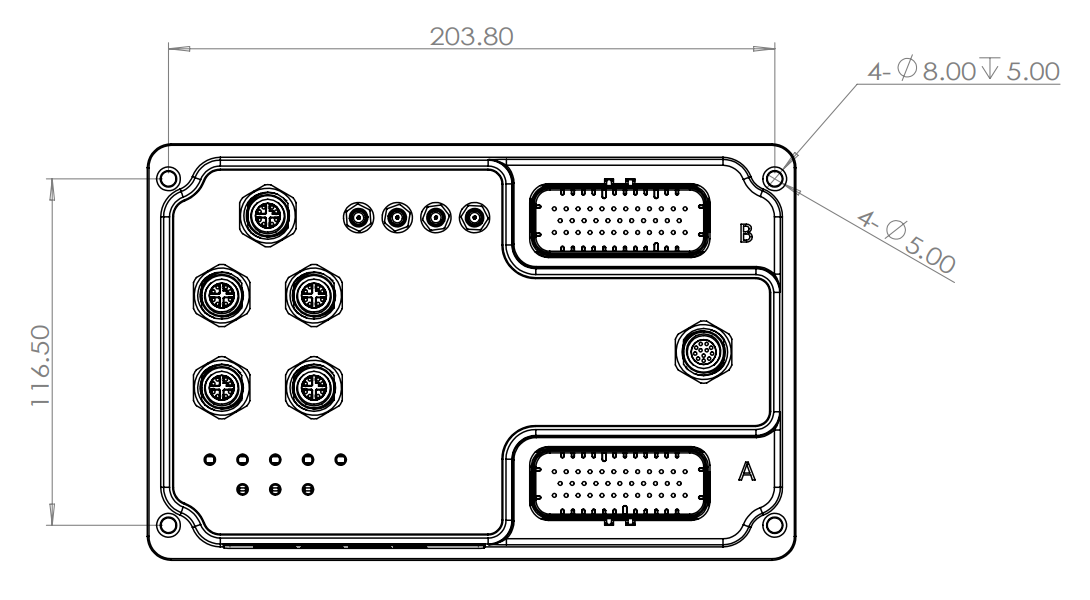
红框内是控制器安装孔的位置。
蓝框内是螺丝过孔尺寸,建议采用 M4 锁紧螺丝。
注意:
建议控制器安装平面有一定的导热散热能力,有利于控制器的整体散热,保证其运行性能。
控制器右侧有一个接地孔,通过圆型端子,将控制器外壳与机器人车体相连。
2.2.4 接线预留空间
3 接口及通用功能
下表为控制器外部接口及数量总览:
类别 | 明细 |
|---|---|
控制器型号 | SRC-3000FS |
通信接口 | |
隔离 CAN | 1 |
隔离 RS485、CAN 可选接口(软件可配,电池通讯接口) | 1 |
隔离 RS485、CAN 可选接口(软件可配) | 1 |
非隔离 RS485 接口 | 2 |
TypeC USB2.0 | 1 |
TypeC USB3.0 | 2 |
安全编码器 | 2 |
控制接口 | |
大电流 DO(单路最大输出电流 1 A,DO_0-3) | 4 |
普通 DO(单路最大电流 400 mA,DO_4-15) | 12 |
OSSD 输出(与 DO 复用,2 个连续的 DO 可配置为一组 OSSD) | 6 |
DI | 16 个 PNP+8 个 PNP / NPN 可配 |
脉冲输出 | 2 |
开关机按键 | 1 |
网络接口 | |
有线网络接口(千兆) | 5 |
无线网络接口 2.4/5GHz 双频 Wifi(工业级) | 2T2R |
电池接口 | |
电池开关(与开关机按键复用) | 1 |
音视频接口 | |
多媒体音频输出 | 1 |
指示灯 | |
WIFI 指示灯 | 1 |
LTE 指示灯 | 1 |
工作状态指示 | 1 |
3.1 接口定义
3.1.1 控制器顶部接口定义
接口布局图片如下: 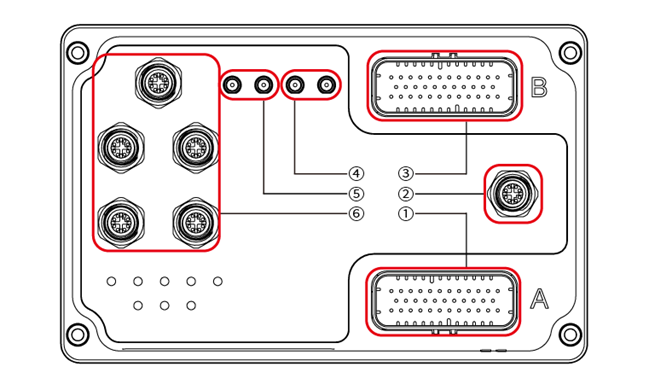
接口说明:
序号 | 解释 |
|---|---|
1 | 连接器 A,J1,黑色 |
2 | M12 外螺纹安全编码器接口,12 PIN |
3 | 连接器 B,J2,蓝色 |
4 | Wifi 天线 * 2 (⼯业级),控制器需要接⼊⽆线局域⽹络时,两根天线必须同时接出(可以使⽤延⻓线),天线不能被⾦属外壳包围 |
5 | LTE / 5G 模块接口 |
6 | M12 Xcode 千兆以太网接口 * 5 |
接口详细定义:
J1(黑色):
[12]Pulse Out A(测试脉冲) | [23]Pulse Out B(测试脉冲) | [35]Passive Out N2(干接点) |
|---|---|---|
[11]DI_18 | [22]DI_19 | [34]Passive Out P2(干接点) |
[10]DI_16 | [21]DI_17 | [33]Passive Out N1(干接点) |
[9]OSSD7A in/DI_14 | [20]OSSD7B in/DI_15 | [32]Passive Out P1(干接点) |
[8]OSSD6A in/DI_12 | [19]OSSD6B in/DI_13 | [31]DI_23 |
[7]OSSD5A in/DI_10 | [18]OSSD5B in/DI_11 | [30]DI_22 |
[6]OSSD4A in/DI_08 | [17]OSSD4B in/DI_09 | [29]DI_21 |
[5]OSSD3A in/DI_06 | [16]OSSD3B in/DI_07 | [28]DI_20 |
[4]OSSD2A in/DI_04 | [15]OSSD2B in/DI_05 | [27]Power Supply2- |
[3]OSSD1A in/DI_02 | [14]OSSD1B in/DI_03 | [26]Power Supply1- |
[2]DI_00(急停输入) | [13]DI_01(急停输入) | [25]Power Supply2+ |
[1]DI_COM | [24]Power Supply1+ |
注:DI_COM 必须接,相同背景颜色为 COM 信号的关联组。
J2(蓝色):
[12]Power Supply5- | [23]DO_01 (Power) | [35]DO_00(Power) |
|---|---|---|
[11]Power Supply4- | [22]DO_03 (Power) | [34]DO_02(Power) |
[10]Power Supply3- | [21]Safe_DO1B/DO_05 | [33]Safe_DO1A/DO_04 |
[9]CAN_L1 | [20]Safe_DO2B/DO_07 | [32]Safe_DO2A/DO_06 |
[8]CAN_H1 | [19]Safe_DO3B/DO_09 | [31]Safe_DO3A/DO_08 |
[7]GND_CAN1 | [18]Safe_DO4B/DO_11 | [30]Safe_DO4A/DO_10 |
[6]CAN_L2_RS485_3B | [17]Safe_DO5B/DO_13 | [29]Safe_DO5A/DO_12 |
[5]CAN_H2_RS485_3A | [16]Safe_DO6B/DO_15 | [28]Safe_DO6A/DO_14 |
[4]GND_CAN2 | [15]RS485_A1(/dev/ttyUart2) | [27]RS485_A2(/dev/ttyUart3) |
[3]RS485.4B_RS232RX_CANL3 | [14]RS485_B1(/dev/ttyUart2) | [26]RS485_B2(/dev/ttyUart3) |
[2]RS485.4A_CANH3 | [13]BAT_SWITCH_O | [25]KEY_BOOT |
[1]GND_BAT_COM | [24]BAT_SWITCH_N |
注:相同背景颜色为 COM 信号的关联组。
编码器接口定义:
序号 | 定义 | 序号 | 定义 |
|---|---|---|---|
1 | ENCODER1_POWER_5V | 2 | ENCODER1_COSA_N |
3 | ENCODER1_COSA_P | 4 | ENCODER1_SINB_N |
5 | ENCODER1_SINB_N | 6 | ENCODER2_COSA_N |
7 | ENCODER2_COSA_P | 9 | ENCODER2_SINB_N |
9 | ENCODER2_SINB_N | 10 | ENCODER2_POWER_5V |
11 | GND | 12 | GND |
注意:
请勿弯曲或者损坏连接器内部针脚。
请勿用手触摸连接器针脚。
线束母端未插针处请用盲堵密封好,保证控制器良好的防水性能。
请使用包装内配送的连接器母座和针脚,按照连接器及连接线定义文档制作线束,配合控制器使用,连接线定义文档请向我司索要。
3.1.2 侧边接口定义
接口图片: 
接口详细定义:
序号 | 接口定义 |
|---|---|
1 | TypeC USB2.0 * 1 |
2 | TypeC USB3.0 * 2 |
3 | 多媒体音频输出 |
3.1.3 指示灯定义
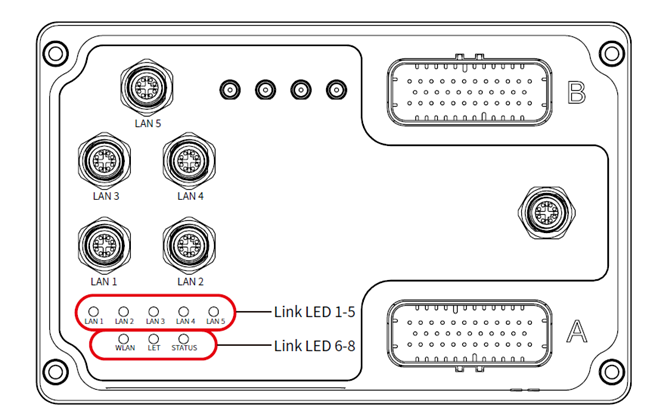
详细指示灯定义(LED 1-5):
以太网指示灯 | LED 1-5 |
|---|---|
未连接 | 关闭 |
10M 网络连接——无流量 | 橙色指示灯点亮 |
10M 网络连接——有流量 | 橙色指示灯闪烁 |
100M 网络连接——无流量 | 红色指示灯点亮 |
100M 网络连接——有流量 | 红色指示灯闪烁 |
1000M 网络连接——无流量 | 绿色指示灯点亮 |
1000M 网络连接——有流量 | 绿色指示灯闪烁 |
详细指示灯定义(LED 6-8):
以太网指示灯 | LED 6-8 |
|---|---|
WLAN 连接指示 | LED 6 |
LTE 连接指示 | LED 7 |
系统工作状态指示 | LED 8 |
3.2 接口功能说明
3.2.1 电源接口
SRC-3000FS 控制器供电电压为 24 V 或 48 V,电压范围是 22 V~55 V。可以选择采用外部 DCDC 供电或者电池直接供电,纹波要求 ≤150 mVpp,系统最小工作电流为 1A@24V(不包含 DO 的供电需求)。
电源输入端具有过压、欠压、过流、短路等保护功能,但超过限定的工作范围会影响控制器正常工作。
根据外部 DO 输出电流的要求,选择合适带载能力的 DCDC 电源。
不要和任何电机设备或者大功耗设备共用一个 DCDC 电源。
请按照 3.1.1 的 J1 线序定义正确连接电源,请注意正负极不要接反。
3.2.2 开关机接口
SRC-3000FS 系列控制器提供一路开机按键。
开机按键连接:选择一个带一路常闭触点,一路常开触点,一路 24 VDC 指示灯的自复位按钮,常闭触点,分别连接”KEY_BOOT”和地,一路常开电池开关触点,分别连接控制器上的“BAT_SWITCH_N”和“BAT_SWITCH_O”,24 VDC 指示灯,分别连接一路 DO 和地。不可使用常闭及常开之间有公共触点的开关。不可用带自锁的开关。
开机:按住开关机按钮直至开机指示灯亮起后,松开开机按钮,完成开机过程。关机:为了避免某些场景下的误触发关机,控制器改为长按关机,即按住开关机按钮 2 秒后释放,等待开机指示灯熄灭,完成关机过程,长按 10 秒以上会自动强制关机。
当电池带有开关并需要控制器控制电池开和关时,需要将电池开关连接到控制器的电池开关接口。
请按照 3.1.1 的 J2 线序定义正确连线后使用开关机功能。
3.2.3 电池开关及充电信号接口
SRC-3000FS 系列控制器提供一路电池开关接口,“BAT_SWITCH_N”和“BAT_SWITCH_O”,这组信号是与开机键复用的,连接电池上的开关控制接口。
控制器提供一路手动充电开关信号,开关信号与 DI 信号复用,当机器人不充电时,充电信号悬空;当机器人连接手动充电时,对应的充电开关信号触发,控制器接收到充电信号。
请按照 3.1.1 的 J1 和 J2 线序定义正确连线后使用电池开关和充电接口功能。
3.2.4 外部以太网接口
控制器提供五路 X-code 千兆以太网接口,与激光,面板或其他执行元件通讯。此接口需要专用线缆。
如果需要外接 AP 等设备,比如 Moxa 无线客户端,需配置为路由模式(WAN 与 LAN 不同网段),不允许使用桥接模式,否则将导致网络冲突。
提供 4 个天线连接器。2 个为内置 WLAN 模组外接天线接口,2 根为内置 LTE/5G 模组外接天线
接口。连接器为标准 SMA 接口,控制器上是外螺内孔,需要使用内螺内针的天线或者馈线。
完整支持 5G 的控制器,将不支持内置 wifi,4 个天线都给到 5G 模块使用。
3.2.5 通信接口
SRC-3000FS 系列控制器提供一路隔离型标准 CAN 接口,两路非隔离型标准 RS485 接口,两路隔离型 CAN / RS485 可切换通信接口,以及一路 USB2.0 TypeC接口和两路 USB3.0 TypeC 接口。
为适配不同的设备,部分接口的 120Ohm 终端电阻通过软件可配,具体情况见下表。CAN 接口一般用于接电机驱动器,RS485 接口一般用于接氛围灯,二维码相机等。
接口 | 数量 | 终端电阻 |
|---|---|---|
隔离 CAN | 1 | 软件可配 |
隔离 RS485、CAN 可选接口(软件可配,电池通讯接口) | 1 | 终端电阻固定 |
隔离 RS485、CAN 可选接口(软件可配) | 1 | 软件可配 |
非隔离 RS485 接口 | 2 | 终端电阻固定 |
本控制器分别提供两路可切换的 CAN/RS485 通道,均可通过软件进行切换,每一组信号之间是互斥的,无法同时使用。SRC-3000FS 与电池之间的通讯使用的是可切换的 CAN/RS485 通道(J2 的 pin2,pin3),另外一路可切换的 CAN/RS485 通道经常与编码器相连。
控制器隔离型通讯接口的地必须与执行元件的通讯地相连,否则设备无法工作。
制作双绞线时,有以下几点要求:
双绞线的绞线率为 33-50 twist/m,线束的每个“绞”中,要求双绞线扭转了 360 度,也可以理解为双绞线中每根线拧转了 180 度。
为了便于与接插件的连接,在连接部分允许有短于 25 mm 的电缆不用双绞。
双绞线高低之间不允许有动力线贯穿。
请按照 3.1.1 的 J2 线序定义正确连线后使用通信功能。
3.2.6 DO 接口
SRC-3000FS 系列控制器提供 16 路源型 DO 接口,其中有四路(DO_00-DO_03)是大电流 Power DO 输出,单路限流保护值为 1 A,为外部设备提供稳定的 24 V 供电。一般车上转向灯,大电流接触器以及激光供电会接在这四个通道上。其余 12 路 DO 输出的限流保护值为 400 mA。
DO 根据实际使用情况,可以通过软件控制相应的 DO 开关状态。
所有 DO 总输出电流取决于控制器的外部稳压电源(DCDC),或者电池的输出电流能力大小,总功耗不可超过 96 W(2 V / 4 A)。
如果想使用控制器的安全功能,请参考 3.3 章节,DO 配置成安全功能后,不受 Roboshop 及其他上层软件控制。
当 DO 接感性负载时,如继电器、接触器,电磁阀等,需要在其线圈两端上加续流二级管,消除感性负载断开时产生的反电动势对系统电路干扰。续流二极管接法详见:附录 2 SRC-3000FS 使用 FAQ
请按照 3.1.1 的 J2 线序定义正确连线后使用 DO 功能,请注意执行件的正负极不能接反。
3.2.7 DI 接口
SRC-3000FS 系列控制器提供 24 路 DI 接口。
DI 只支持 24 V 电平逻辑的输入电压。
DI 支持源型与漏型输入,由 COM 端接的是 0 V 还是 24 V 决定,接 0 V 时,仅支持源型输入;接 24 V 时,支持漏型输入。此功能仅限于 DI_16-23,为了方便分析问题,建议按源型输入接。
控制器输入管脚拉高时控制器接收到高电平逻辑(请勿直接接电源),将 DI 端口拉低或接地,控制器接收到低电平逻辑 。悬空默认为低电平逻辑。
当控制器外接输入源为机械式开关,干簧管式传感器,两线式传感器时,请勿直接将传感器或开关信号线接入控制器中,请在传感器的信号线上串联 470-2kΩ 1/2W 5% 电阻之后接入控制器。
如果想使用控制器的安全功能,请参考 3.3 章节,DI 配置成安全功能后,不可以作为普通 DI 使用。
请按照 3.1.1 的 J1 线序定义正确连线后使用 DI 功能。
3.2.8 外部驱动器供电接口
SRC-3000FS 系列控制器没有提供 SRC-2000 的内置驱动器供电接口,需要通过 DO 控制外部继电器扩展。
3.3 安全功能
3.3.1 安全信息
基本安全说明:不正确的安装或使用将导致无法达到所要求的安全水平。
确保遵守说明书,特别是本指南中的检查说明(如涉及使用、装配、安装或集成到机器控制系统中)。部署、组装、连接、调试和维护等操作,必须由有资质的安全人员操作。
检查必须由有资质的安全人员或经专门认证授权的人员进行,并以第三方随时可追溯的方式进行记录。
实际安全等级取决于外部接线、接线实施方式、参数设置、控制开关的选择及其在机器上的布置。
3.3.2 安全外设清单
目前 SRC-3000FS 支持的安全外设清单如下:
类别 | 型号 | 品牌 |
|---|---|---|
安全急停开关 | 双刀常闭逻辑 | 和泉,施耐德 |
安全激光 | nanoScan3 Core IO | Sick |
安全编码器 | DFS60S | Sick |
安全接近开关 | IN30 IME2S | Sick |
BI4-M12-2APS8X2-H1141 | TURCK | |
安全继电器 | SICK OSSD1 RELY | Sick |
3.3.3 安全急停功能接口
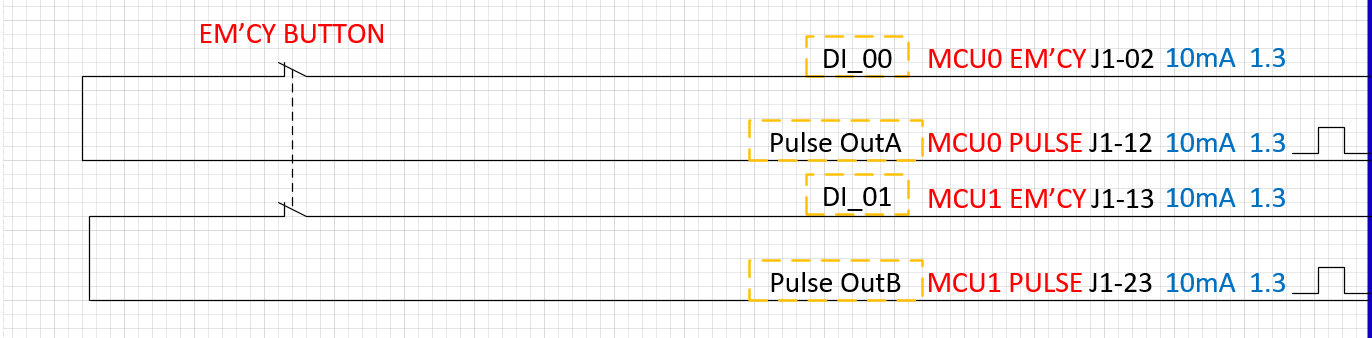
SRC-3000FS 系列控制器的急停按键输入功能是集成在DI接口中,急停输出分干节点输出和湿节点输出,湿节点与 DO 复用,具体的 DO 选择通过软件配置实现。
急停开关连接方法:选择一组双通道的急停按钮,拥有两对常闭触点,第一对分别连接“Pluse OutA”和“DI_00”,第二对分别连接“Pluse OutB”和“DI_01”,此接法不可更改。
控制器的急停输出同时支持干接点和湿节点接入方式,一般作为驱动器的急停信号接到驱动器的 STO 接口或者急停 DI 接口上,正常情况下干接点闭合,急停情况下断开,干节点带 120 mA 限流保护,湿接点输出电压为 24 V,最大电流为 400 mA, 正常情况下为高电平,急停情况下为低电平。
拍下急停按键会通过硬件电路使得干接点断开,反应时间小于 2 ms;也可以通过软件控制湿节点触发驱动器急停,反应时间小于 5 ms。
在触发任何急停事件时会通过断开干接点或湿节点变低电平的方式输出急停信号。
请按照 3.1.1 的 J1 和 J2线序定义正确连线后使用急停功能。
急停接线图如图所示:
3.3.4 安全 DO 接口
SRC-3000FS 系列控制器提供的 12 路 DO 接口(DO_04~DO_15),可以两两组合成安全 DO 用于激光切区,安全急停输出的湿节点或者驱动安全继电器。6 个组合顺序见下表,可以通过软件配置其中任意一组或若干组。
序号 | DO 定义 | 备注 | |
|---|---|---|---|
1 | Safe_DO1A/DO_04 | Safe_DO1B/DO_05 | 优先用于急停输出湿节点 |
2 | Safe_DO2A/DO_06 | Safe_DO2B/DO_07 | 优先用于激光切区 |
3 | Safe_DO3A/DO_08 | Safe_DO3B/DO_09 | 优先用于激光切区 |
4 | Safe_DO4A/DO_10 | Safe_DO4B/DO_11 | 优先用于激光切区 |
5 | Safe_DO5A/DO_12 | Safe_DO5B/DO_13 | 优先用于激光切区 |
6 | Safe_DO6A/DO_14 | Safe_DO6B/DO_15 | 优先用于驱动安全继电器 |
当驱动安全激光切区时每组安全 DO 可以配成互为反逻辑输出,驱动安全继电器时配置成相同逻辑输出,每组 DO 可以加测试脉冲。
如果对应成对 DO 没有组合成安全 DO,可以单独用作普通 DO,用于驱动非安全功能设备,见 3.2.6。
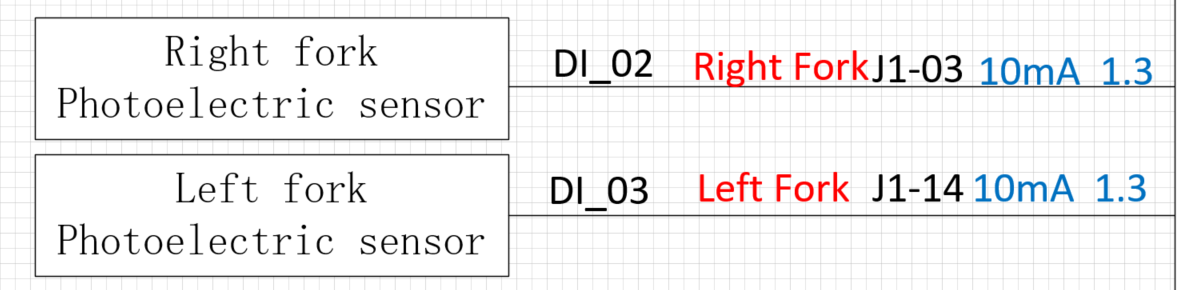
3.3.5 安全 DI 接口
SRC-3000FS 系列控制器提供的 24 路 DI 接口(DI_00~DI_23),可以两两组合成安全 DI 用于检测内部测试脉冲信号和外部 OSSD 信号。优先选择 2~8 这 7 个组合顺序,见下表,可以通过软件配置其中任意一组或若干组。
1 | DI_00 | DI_01 | 必须用于安全急停键输入 |
|---|---|---|---|
2 | OSSD1A in/DI_02 | OSSD1B in/DI_03 | 可以作为 OSSD 信号检测 |
3 | OSSD2A in/DI_04 | OSSD2B in/DI_05 | 可以作为 OSSD 信号检测 |
4 | OSSD3A in/DI_06 | OSSD3B in/DI_07 | 可以作为 OSSD 信号检测 |
5 | OSSD4A in/DI_08 | OSSD4B in/DI_09 | 可以作为 OSSD 信号检测 |
6 | OSSD5A in/DI_10 | OSSD5B in/DI_11 | 可以作为 OSSD 信号检测 |
7 | OSSD6A in/DI_12 | OSSD6B in/DI_13 | 可以作为 OSSD 信号检测 |
8 | OSSD7A in/DI_14 | OSSD7B in/DI_15 | 可以作为 OSSD 信号检测 |
9 | DI_16 | DI_17 | 用做 DI 信号检测 |
10 | DI_18 | DI_19 | 用做 DI 信号检测 |
11 | DI_20 | DI_21 | 用做 DI 信号检测 |
12 | DI_22 | DI_23 | 用做 DI 信号检测 |
其中 DI_00/DI_01 用于急停按键输入,见 3.3.2。
安全 DI 使用方式如下图所示:

如果对应成对 DI 没有组合成安全 DI,可以单独用作普通 DI,用于接非安全功能传感器,见 3.2.7。
3.3.6 编码器接口
控制器使用了一个专用的 M12 A-Code 12 PIN 母插座作为控制器与电机编码器之间的接口。接口定义见 3.1.1。
控制器支持支持 sin/cos 编码器。
通过软件配置,编码器接口可以监测 AMR 行驶速度。通过这些数值来决定激光切区逻辑。
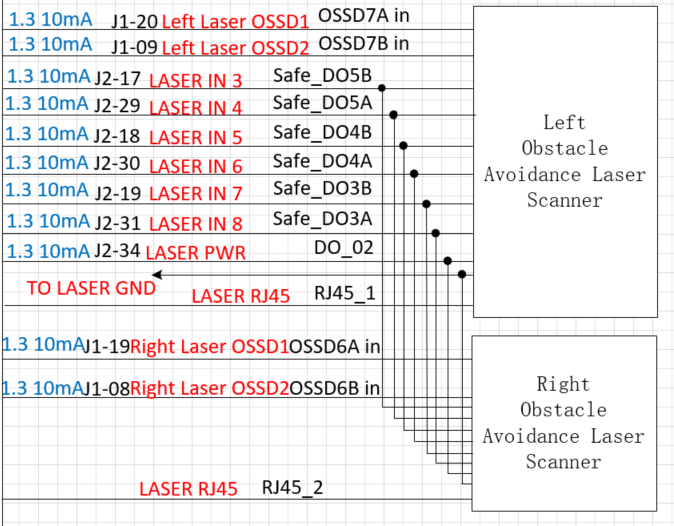
3.3.7 安全激光接口
安全激光是一种符合安全标准的安全型激光传感器,安全激光接口不是一个单独的硬件接口而是基于已有硬件、软件功能定义的一种复合接口,它包含以下几个功能接口:
接口 | 功能 | 控制器接口 |
|---|---|---|
激光切区输出 | 根据 AMR 速度或者转向切换不同形状的激光检测模板 | 安全 DO |
激光保护区输入 | 激光检测到保护区有障碍物,激光的 OSSD 输出由高电平变低电平,AMR 立刻停止移动 | 安全 DI |
激光报警区输入 | 激光检测到报警区有障碍物,激光的普通 DO 输出由高电平变低电平,AMR 减速移动 | 普通 DI |
激光 EDM 信号输入 | 激光检测到自身故障,激光的普通 DO 输出由高电平变低电平,AMR 立刻停止移动 | 普通 DI |
避障激光接线如下图所示:
3.3.8 安全接近开关
安全接近开关用于检测机构移动的行程是否到位,需要用到控制器的安全 DI 来检测安全接近开关的 OSSD 信号。
3.3.9 安全维护
安全功能应由合格的安全人员定期检查。
根据相关规定,在规定的时间内对设备进行检查。以确保在第一次调试后发现机器上的变化或保护设备上的篡改。
每个安全功能必须在固定的时间内进行检查。安全功能的有效性必须由授权的合格人员进行检查。
如果改变机器或安全功能或修改或修理安全控制器,请重新检查相应的设备。
定期检查,保持控制器处于最佳运行状态。
检查控制器的安装条件和接线是否正确。
定期验证安全功能是否符合应用要求和所有适用的法规和标准(如定期检查),以确保安全功能的可靠性。
3.3.10 安全参数
安全参数 | |
|---|---|
安全完整性等级 | SIL2(IEC 61508) |
类别 | Cat.3 (ISO 13849-1) |
性能等级 | PLd (ISO 13849-1) |
PFH | 1.38*10-7 |
TM(连续工作时间) | 5 年 |
4 注意事项
请务必遵循下面的要求,否则会影响安全或对控制器造成损坏:
为安全起见请务必选用带短路保护的电池,不确定的话请在电池输出处增加空气开关;
为了提高控制器的安全性,控制器铝板右侧有一个 M3 螺纹孔,必须使用 2.5 平方黄绿色线与机器人车体相连,车体必须通过导通良好的接地链或接地毛刷接地。车内接地线不许桥接。
请将所有裸露端子(开关上的,裸线)做绝缘处理。
线束母端连接器上没有插针的位置,请用盲堵密封,否则会影响控制器的防水性能。
CAN 总线,控制器用菊花链方式连接 AGV 的若干驱动器,控制器在菊花链近端,需要在 Roboshop 里选上 120ohm 终端电阻选项,菊花链远端的驱动器也需要接 120ohm 终端电阻。CAN 连接线需要使用均匀双绞的双绞线,若有屏蔽层请将屏蔽层单点接地,并将驱动器的 CAN 地和控制器的与之对应通道的 CAN_GND 相连,否则控制器无法与执行元件通讯。
禁止进入控制器系统内部安装其他软件程序,否则会导致不可预估的错误。
禁止修改控制器 IP 地址或其他内部设置,否则会导致严重的通讯错误。
禁止带电插拔 J1、J2 接口,特别注意电池不受控制器控制的情况,一定要确保电池断电后插拔 J1、J2 接口。否则可能会损坏控制器。
在 J1 与 J2 连接器插入控制器之前,请检查线束母端针脚是否有弯曲的情况,如有,请更换线束;轻则会损坏控制器侧连接器端子,重则引发短路导致火灾。
J1 和 J2 线缆插入对应端口都会有卡扣到位的声音,如果没有听到,请检查 J1 和 J2 线缆接插件内的橡皮密封圈是否有翻转卷曲现象,如有,请理顺后再插入对应端口。
关机时,请按关机键关机,请勿直接关电池,否则容易造成控制器的硬件或者软件故障。
如果电池换置不当,电池会产生爆炸的危险,请务必使用同一型号的或者相当类型的且为制造商推荐的电池。
废旧电池、废旧控制器由产品购买方按照国家相关法律法规进行处理。
第一次通电测试建议按如下步骤:
检查整车正负之间是否短路。
检查整车整机与外壳螺丝是否短路。
检查端子排正负是否接反。
检查 DO 与地之间有无短路。
检查控制器外壳与大地之间电阻是否小于 1 欧姆。
检查 DCDC 输入端子正极是否与负极短路。
检查 DCDC 输出端子正极是否与负极短路。
检查电机电源正极是否对地短路。
检查电机电源正负极是否反接。
检查激光电源正极是否对地短路。
检查激光电源正负极是否反接。
第一次通电前,断开激光的电源,断开电机驱动器电源。
若通电无异常,关机后接上电机驱动器电源通电。
若通电无异常,关机后接上激光电源通电。
开始调试测试。
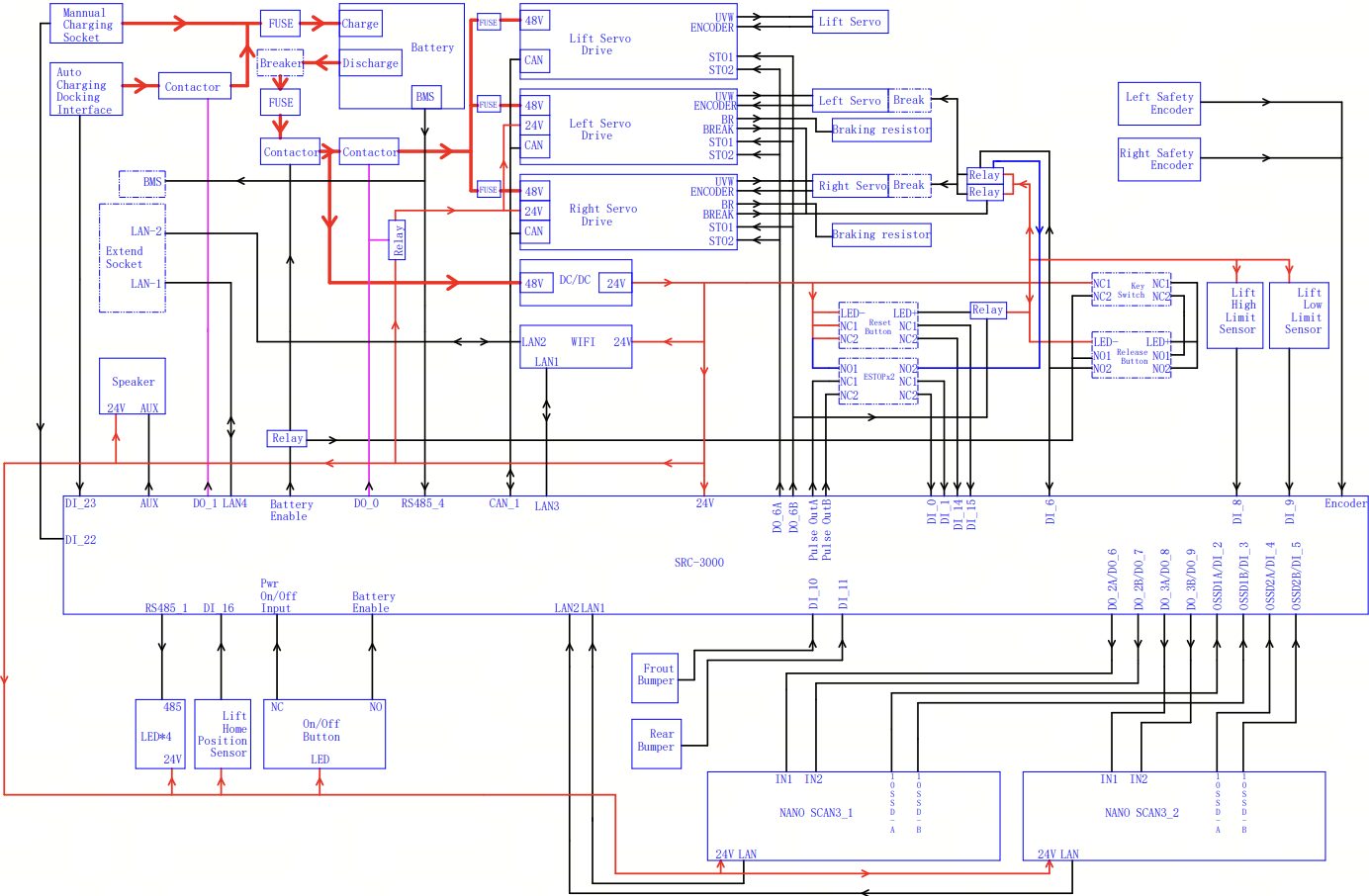
附录 1 典型电气原理图
使用不同电机及驱动器,接线可能会略有不同,下图仅供参考:
附录 2 SRC-3000FS 使用 FAQ
1. 一键开关机键如何接?
按键必须是不带自锁的;C1、C2 不导通。下面的数字是 J2 接口的线序。
NC:Normal Close(常闭)
NO:Normal Open(常开)
C:Common(公共端)
LED:指示灯
GND:地
2. 长按开关机键会发生什么?
关机状态:长按键不放,开机,并且维持开机状态;
开机状态:长按键不放,系统关机;
开机键线缆脱落,电池又供电了,系统会异常开机,因为开机键线缆脱落等于长按开机键。
3. 如果控制器死机了怎么办?
长按开关机键 10 秒以上,释放按键,控制器会强制关机。
4. 电池开关闭合后输出有延时的电池对开机的影响?
如果使用控制器的电池开关来控制电池对外供电和断开对外供电,而且电池开关闭合后电源输出有延时,这时需要长按开机键,按的时间必须长于电池延时输出的时间。
5. 继电器和接触器等感性负载如何接在 PDO 上?
继电器、接触器等感性负载必须接续流二极管以消除感性负载断开时产生的反电动势对系统电路干扰,续流二极管阴极接 PDO 输出,阳极接 PDO 地。
如果不加续流二极管可能产生的干扰危害:
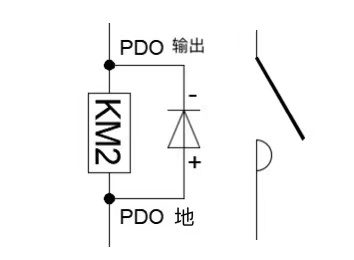
激光通讯受干扰,控制器可能出现激光连接失败的告警。
控制器 Linux 系统崩溃。192.168.192.5 网口无法通讯,Roboshop 连接不上。
接接触器时,请判断一下接触器线圈的内阻和起跳电流,不要超过 PDO 的输出电流(1 A)。
二极管推荐型号:SR3100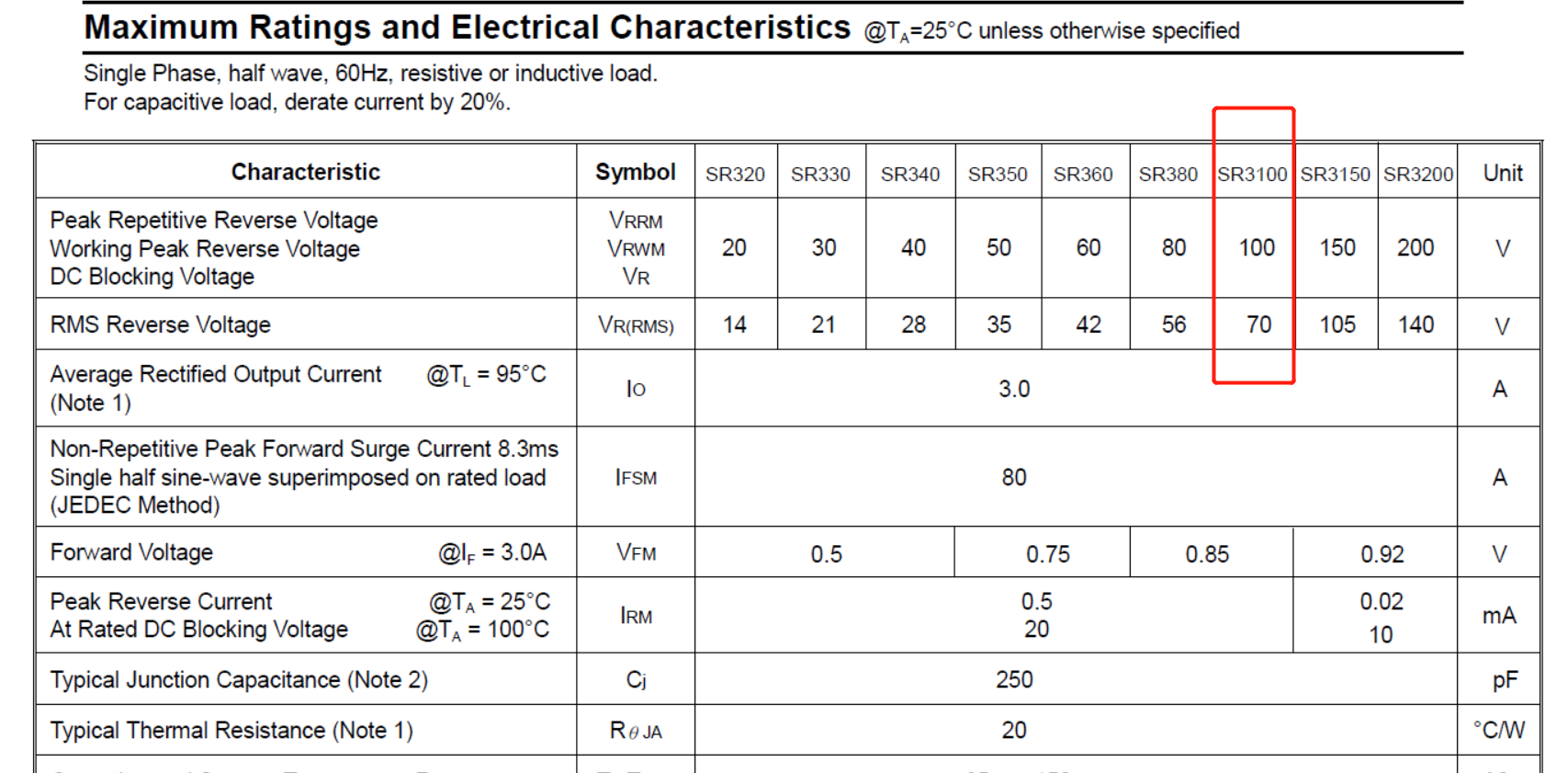
6. 电池过放或短路保护后如何激活?
以下内容仅针对经过我司验证的支持再次激活的电池。
电池过放后,电池进入过放保护状态。这时即使闭合电池开关,电池也不会输出。此情况下使用充电器强制充电模式即可重新激活电池;电池输出意外短路后,电池将进入短路保护状态。等外部短路状态撤消后,电池需要充电器的强制充电模式激活后才能恢复正常输出。
如果强制充电激活无效,电池必须返厂维修。
7. 运行过程中发现 DI 不会被触发?
检查 DI COM 口是否正确连接。
另外 DI COM 口未接可能导致一个电路上触发一个 DI 但在软件上显示多个 DI 被触发的问题。
8. CAN 口 TX/RX、RS485 口 A/B 连接正确,但是无法通信?
CAN 口与 RS485 口在设计上是隔离的,需要通过 COM-GND 接口保证接口接地。
另外 CAN 口与 RS485 也可能由于波特率设置的不同导致无法通讯。
附录 3 术语表
英文简称 | 中文名称 |
|---|---|
SRC | 仙工机器人控制器(Seer Robotics Controller) |
AGV | 自动导引运输车(Automated Guided Vehicle) |
AMR | 移动机器人(Autonomous Mobile Robot) |
TE | 泰科电子(TE Connectivity) |
DI | 数字输入 |
DO | 数字输出 |
Passive Out | 干接点输出 |
Pulse Out | 脉冲输出 |
Connector | 连接器 |
DCDC | 直-直稳压电源 |
PS+(-) | 电源+(-) |
RJ45 | 八芯型以太网双绞线插座 |
RS232 | 异步传输标准接口 |
RS485 | 差分型异步传输标准接口 |
CAN | 控制器局域网络 |
Roboshop | 仙工机器人客户端软件 |
更多信息请访问仙工智能官方网站:https://cn.seer-group.com/
API 相关信息请访问仙工智能文档网站:https://docs.seer-group.com



 感谢反馈
感谢反馈
 感谢反馈
感谢反馈
 让移动机器人没有门槛
让移动机器人没有门槛