























红外相机标定是在传统2的相机的基础上部署的,操作的基本流程参考传统相机标定。
一, 传统相机标定
注:部分相机相机,例如工业相机,可按照RoboShop普通相机标定即可,标定前拆下滤光片,标定完成后安装好滤光片,如滤光片和镜头不可分离则按照以下方案进行标定
二,红外相机标定
2.1 标定板介绍
红外相机标定类似与传统2D相机的标定。但是由于红外相机只能捕获特殊波段的光线,因此不能使用普通的打印标定板。也不能兼容之前的2D相机标定板。此标定板如下图所示,不同于之前的APRILTAG标定板,其中标定时需要相机同时观测到所有的圆。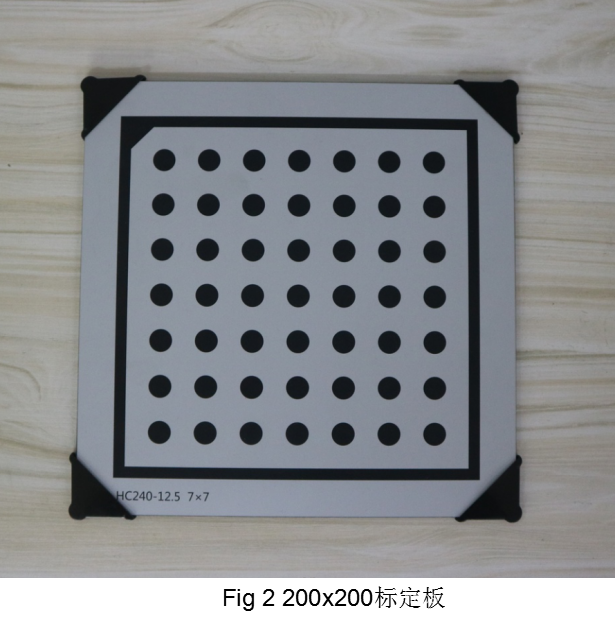
圆标定板
2.2 标定过程注意事项
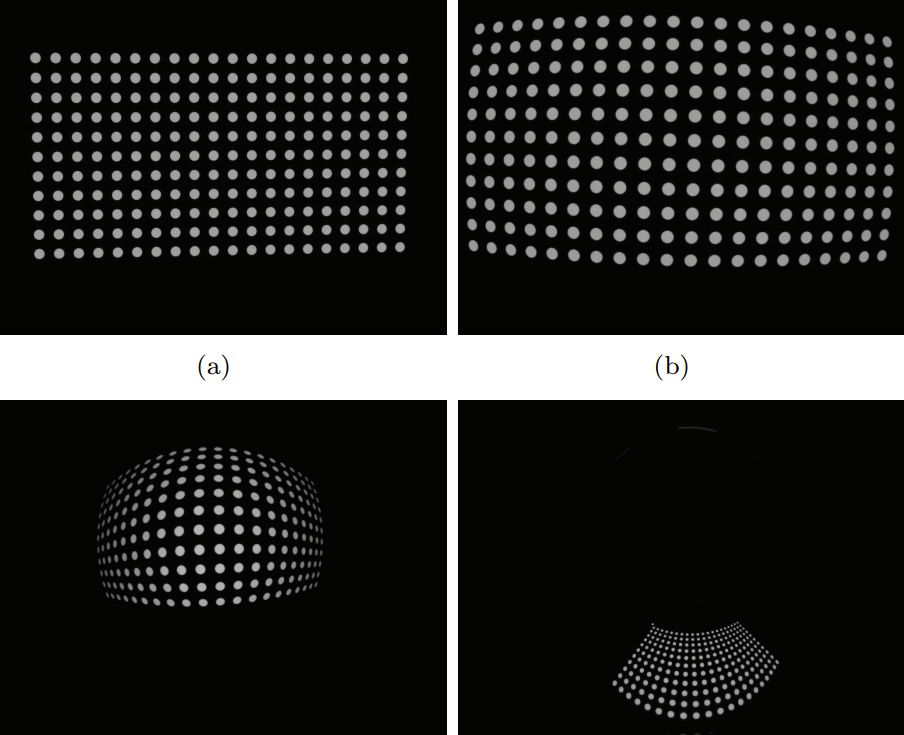
标定板实际检测效果
由于红外相机用于高精度的辅助定位,因此对红外相机的标定提出了更高的要求。在这里我们使用自研的圆片反光标定板标定相机。
因为反光和红外光线的原因,红外相机标定时不能较大范围内移动标定板。单为保证标定的精度,需要将标定板在检测时尽可能的大范围运动。如下图所示,同时需要观察图像中标定板的反光情况,当反光成都较大时,圆的形状会产生一定的程度的拉长和变形,因此需要调整标定板到合适的角度及距离。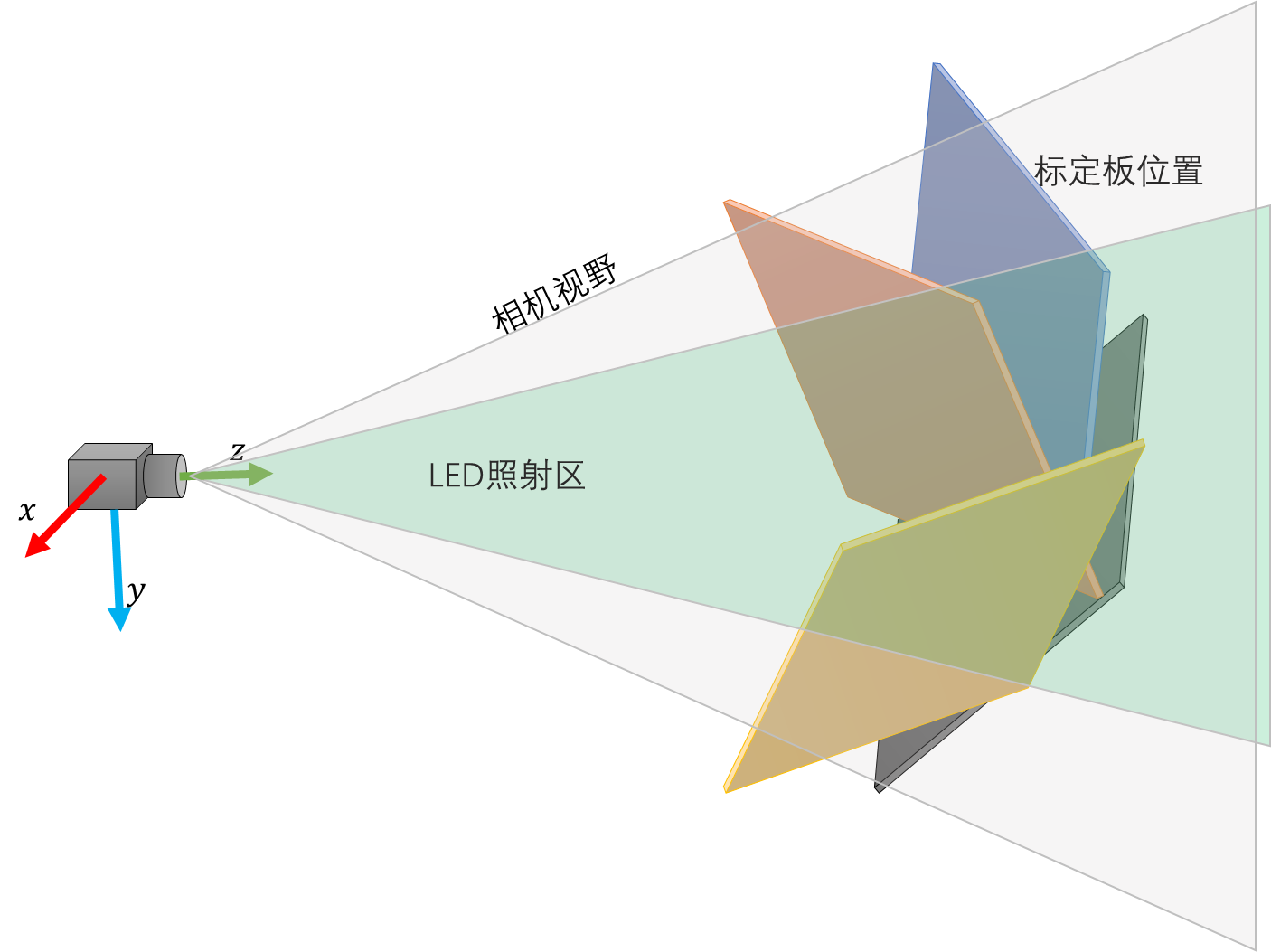
标定结束后,需要检查相机标定的效果,其中相机标定的重投影误差平均值应该在0.5个像素左右,最大重投影误差在1个像素左右。
警告:由于红外相机需要精准标定,如果红外相机在机器人安装的位置比较高,建议标定时将相机从机器人取下,方便标定。标定完成后再将相机安装到车体上,进行相机和车体标定。
三,Roboshop相机标定插件标定红外相机
由于红外相机的特殊性,相机模型目前仅支持针孔和全针孔两种类型[1],目前仅支持全针孔模型。其中标定结果 建议使用roboshop pro工具标定工具,同时也可通过其他标定工具获得。
其中k2,k3,k4,k5,p1,p2等六个参数中都是0时,相机模型自动更改为普通针孔相机类型,当k2,k3,k4,k5,p1,p2六个参数中任意一个不为0是,相机自动认为全针孔模型。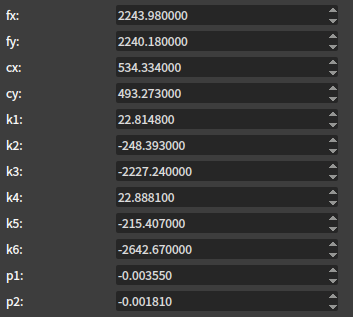
[1]《A Flexible New Technique for Camera Calibration》Zhengyou Zhang IEEE Transactions on Pattern Analysis and Machine Intelligence December 2000, Vol 22: pp. 1330-1334



 感谢反馈
感谢反馈
 感谢反馈
感谢反馈


