























随着室内环境中定位精度的要求越来越高,许多定位技术相继出现。不同于激光的抽象信息表达方式,也不同于UWB等基于信号强度的位置感知,相机实现了一种更加直观,更加快速的位置估计方式。受限于相机易受各种光线影响,使得其很难在真实场景中使用。不同于传统的相机类型,红外相机只识别自然光中的特殊波段的光线。红外相机的引入也使得相机成为未来机器人鲁棒定位的重要选择之一。
一,红外相机介绍
红外摄像机:人的眼睛能看到的可见光按波长从长到短依次为红、橙、黄、绿、青、蓝、紫。比紫光波长更短的光叫紫外线;比红光波长更长的光叫红外线,人的肉眼是看不到红外线的。因为数码摄像机用CCD感应所有光线这就造成所拍摄影像和我们肉眼只看到可见光所产生的影像很不同。为了解决这个问题,数码摄像机在镜头和CCD之间加装了一个红外滤光镜,其作用就是让一定波段内的红外光通过,吸收或反射可见光和紫外线。大多数的红外摄像机采用LED作为红外摄像机的主要材料 。
红外发光二极管_百度百科
关于相机的详细说明请参考下面链接:
2D 相机
1.1 红外相机组成
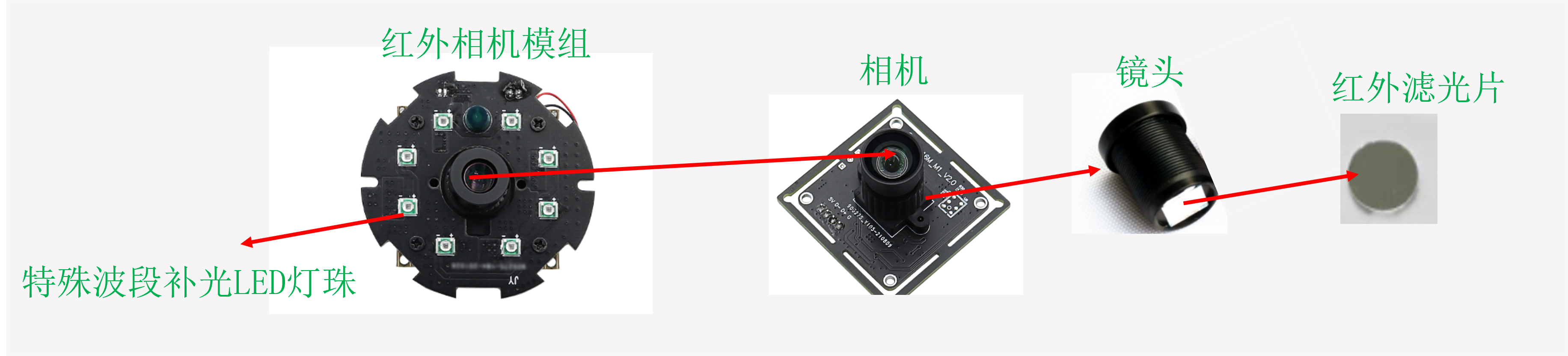
现在的绝大多数工业相机厂商都提供了红外相机模组,可以直接使用,注意:红外相机一般有固定的波长限制,例如940nm,850nm。注意该波段应该与LED波段一致。
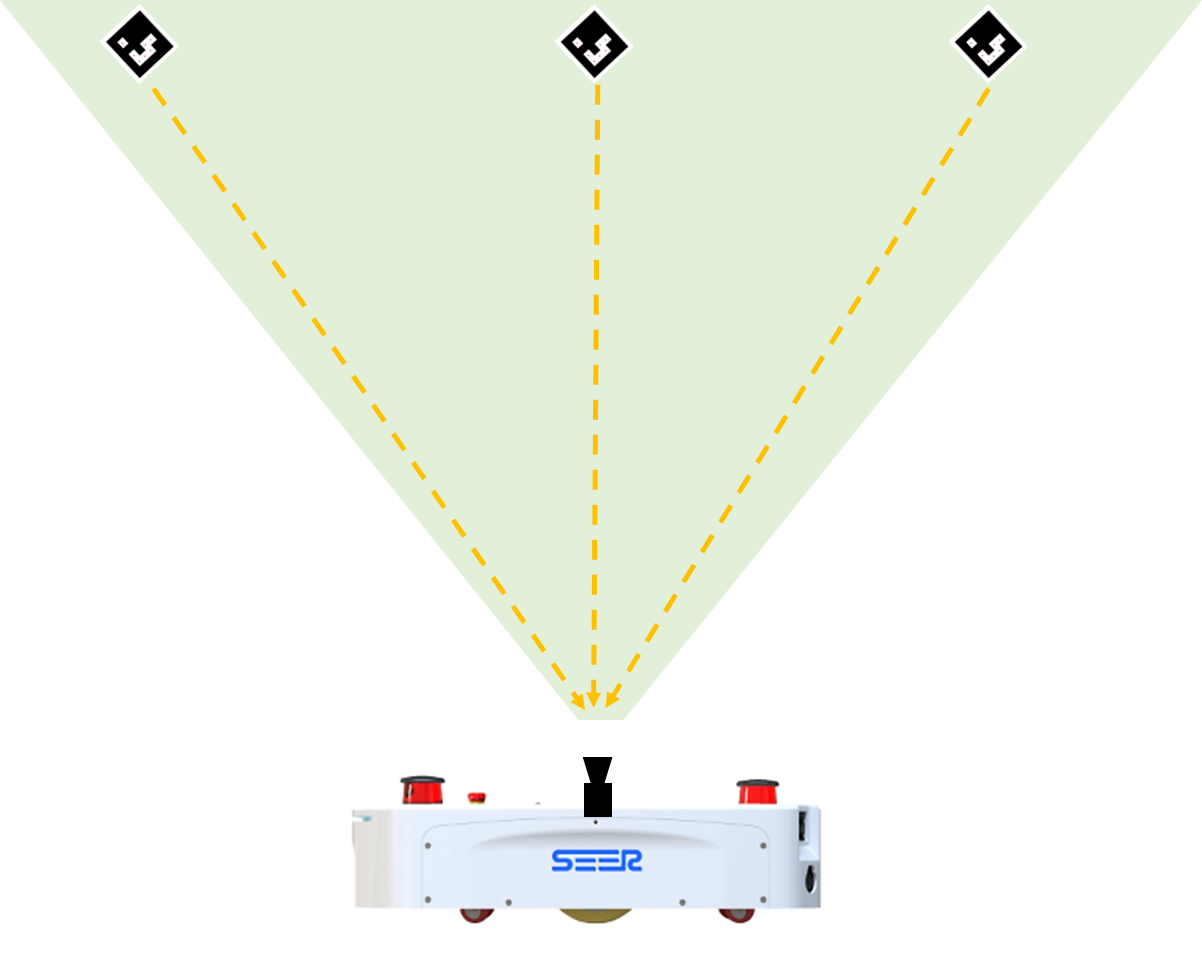
1.2 红外相机安装
下图中,机器人搭载顶视红外相机模组,绿色部分是红外LED相机覆盖的区域,在该区域内二维码都会被光线照射,反射光线会被相机捕获,进而获得每一个二维码在图像中的成像。
 1.3 支持相机
1.3 支持相机
目前此功能仅支持海康系列相机,启动相机镜头和补光设备由仙工提供。在机器人模型配置中开启相机功能,并选择相应的相机类型。当相机模型创建成功后,选择合适的IP和端口号。打开use_for_localization开关,确保开启相机的定位功能。如果相机没有相应的配置即相机不支持定位功能。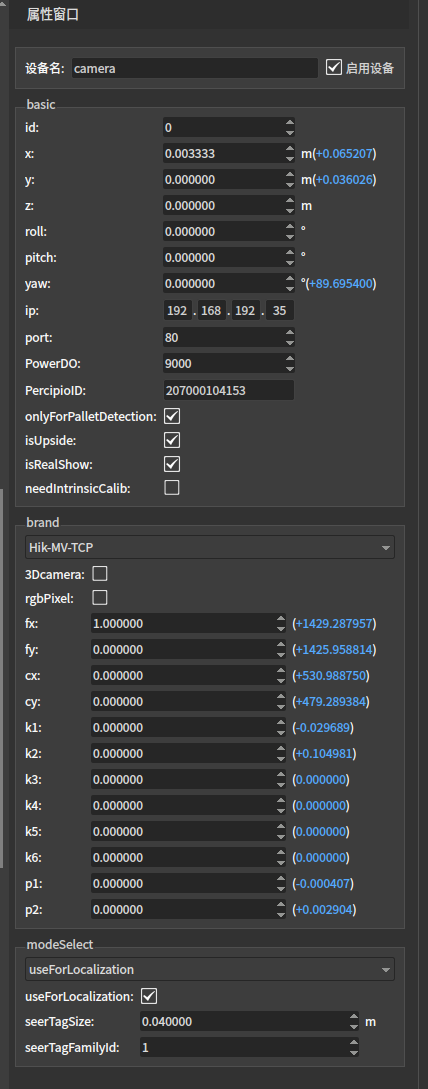



 感谢反馈
感谢反馈
 感谢反馈
感谢反馈一,红外相机介绍
1.1 红外相机组成
1.2 红外相机安装
1.3 支持相机



