







帮助中心主页



智造资源库















通识
网络设备
激光
导航激光
驱动器
步科
读码相机
3D相机
奥比中光 Mini S
大疆 Livox Mid-70
串口服务器
复合机器人末端设备
电池
SRC-2000(S) 控制器电池适配说明
SRC-2000(S) 控制器电池适配说明
I/O类传感器
IO 扩展
称重传感器
货叉压力传感器
海康EB435I(不推荐使用)
一、适用范围
本文档针对海康EB435I 相机做避障功能,当前海康EB435I仅在2000控制器上支持,同时一台控制器限制连接一台海康EB435I。相机详细信息可参考官网介绍
二、安装和连接方式
仙工智能主要采用海康相机进行避障,海康EB435I相机采用 usb 接口进行连接。尺寸图如下所示: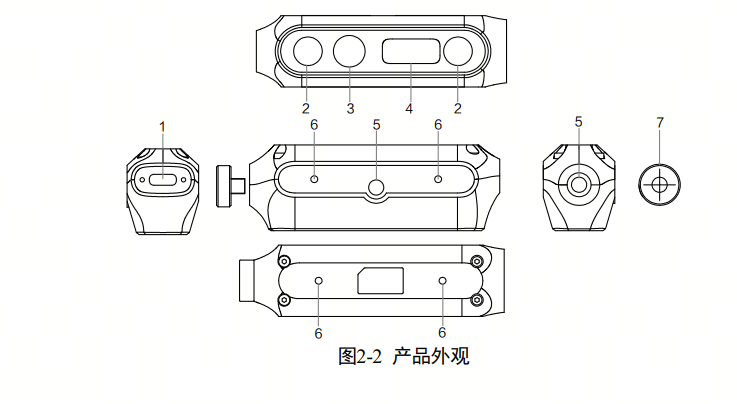
小车会预留好安装位置,如图上所示。图中5和6为螺丝安装孔位。
如上图所示,HIKROBOT 文字向上为正装,否则是反装。
三、roboshop 配置
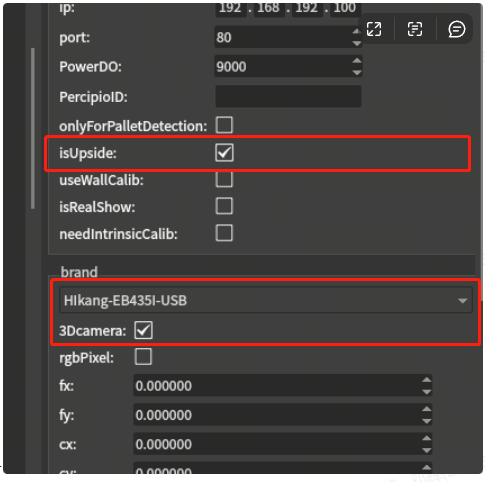
海康EB435I相机为USB接口,因此不需要配置网络端口。如上图所示,【brand】选择【HIKang-EB435I-USB】,勾选【3Dcamera】。然后根据安装情况选择是否勾选【isUpside】,正装需要勾选,否则不需要。
四、相机模型配置
| Key | Description | Value | Unit |
|---|---|---|---|
| x | 在x轴位置 | 相机在机器人坐标系下X方向的位置 | |
| y | 在y轴位置 | 相机在机器人坐标系下y方向的位置 | |
| z | 在z轴位置 | 相机在机器人坐标系下z方向的位置 | |
| roll | 相机在机器人坐标系下X方向角度偏差 | ||
| pitch | 相机在机器人坐标系下y方向角度偏差 | ||
| yaw | 安装角度 | 相机在机器人坐标系下z方向的角度偏差 | |
| ip | 相机配置的ip地址 | ||
| port | 通讯接口 | 相机配置的端口号 | |
| PowerDO | 相机接在机器人的DO号 | ||
| PercipioID | 相机本身的唯一ID(目前图漾和DJI需要填) | ||
| onlyForPalletDetection | 栈板识别功能 | 勾选则相机只用于栈板识别功能 | |
| isUpside | 相机是否倒装 | 勾选则为倒装 | |
| Cameralnfo | |||
| Brand | 相机品牌型号 |


最近更新 2023/11/14

 感谢反馈
感谢反馈有帮助

 感谢反馈
感谢反馈没帮助



