



















1. Scope of Application
1.1 Platform Applicability
SRC 2000
1.2 Communication Mode
CAN
1.4 Baud rate
250 kilobits per second
1.5 Line Sequence
The customer can also communicate with the network port.

1.6 Job Description



Two, Parameter Configuration
2.1 Model File
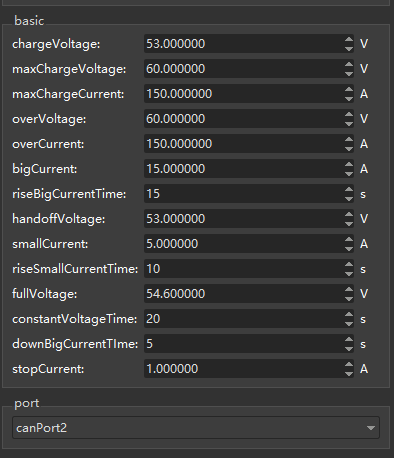
chargeVoltage: Charging voltage
maxChargeVoltage: Maximum charging voltage
maxChargeCurrent: Maximum charging current
overVoltage: Battery overvoltage threshold
overCurrent: Indicates the battery overcurrent threshold
bigCurrent: Indicates the large constant current value
riseBigCurrentTime: Indicates the time when the current is raised from 0 to the current.
handoffVoltage: Voltage that switches from a high constant current to a low cross current
smallCurrent: Indicates the small constant current value
riseSmallCurrentTime: Time to rise from 0 to high constant current according to this time
fullVoltage: Full battery voltage
constantVoltageTime: Constant voltage time
downBigCurrentTime: Constant current time (descending from a large current to a small current based on this time)
stopCurrent: Stops the current
port: Select a communication channel
Three, Methods of Use
3.1 Model File

The configuration method is identical to that of the contact charging pile.
Within the model file, switchDO was set as virtual DO10, and the openDODist distance was adjusted accordingly.
3.2 Map
CP station with contact charging station



 Thanks feedback
Thanks feedback
 Thanks feedback
Thanks feedback
 Build your own AMR fleet within days
Build your own AMR fleet within days


