



















DSDSIIIOIDSDEIS - 1. Scope of Application
This document aims to describe the configuration method of cable encoders from Kuebler.
Second, Debugging Resources
Debugging tool USBCAN(CANalyst-II)
Three, Wiring Method
(1) Follow the wiring definition of the cable encoder and connect the canH and canL pins of the cable encoder to the canH and canL terminals on the can box.

(2) Turn on the cable encoder as per the connection definition. The encoder's red light will flash and turn oncan. In the upper computer software of the box, the default baud rate is 250K, and the encoder blinks green.
IV. Configuration of Cable Encoder Parameters
(1) The encoder's default baud rate is 250K, its default address is 0x3F, and the terminal resistance is set to E by default.
(2) Check the return value information on the host computer:

(3) Send frame ID: 600 plus node ID
Adjust the baud rate of the cable encoder to 125K.

Send data: Frame ID 0x63f (00 00 06 3f) 2f 00 21 00 04 00 00 00
Returned data: Frame ID 0x53f 60 00 21 00 00 00 00 00
(4) Modify the cable encoder address to 05

Send data: Frame ID 0x63f (00 00 06 3f) 2f 01 21 00 05 00 00 00
Returned data: Frame ID 0x53f 60 01 21 00 00 00 00 00
For instance:

(5) Adjust Terminal Resistance: The default terminal resistance is enabled. This step may be skipped.
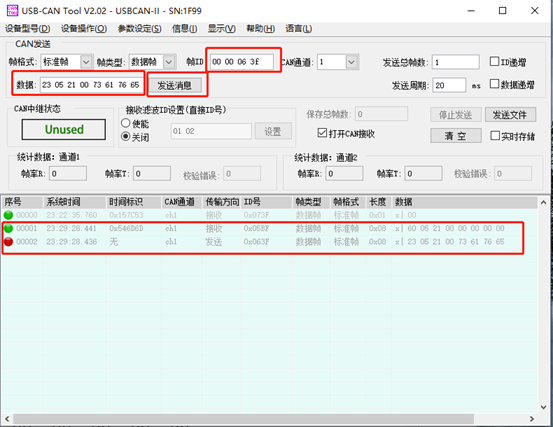
(6) Save the changes
Send data: Frame ID 0x63f (00 00 06 3f) 23 05 21 00 73 61 76 65
Returned data: Frame ID 0x53f 60 05 21 00 00 00 00 00
(7) Turn off the cable encoder and then turn it back on. Now, access the CAN module using a baud rate of 125k.
(8) Write the start command.

Send Data: Frame ID 0x000 (00 00 00 00) 01 00
(9) Currently, the nodeID has been updated to 05 and the sent frame ID remains as 600+nodeID.
(10) Adjust the sensor frequency to 10ms to upload a single frame of data.
Send data: Frame ID 0x605 (00 00 06 05) 2B 00 18 05 0A 00 00 00
Returned data: Frame ID 0x585 60 00 18 05 00 00 00 00
Afterward, the pull coder will transmit information every 10 milliseconds.
(11) Save Configuration
Send data: Frame ID 0x605 (00 00 06 05) 23 10 10 01 73 61 76 65
Returned data: Frame ID 0x585, 60, 10, 10, 01, 00, 00, 00, 00
(12) Turn off the cable encoder. Configure the model file above with can and can2 connected to src.
Appendix:
Debugging tool USBCAN(CANalyst-II)
V. Testing
Six Commonly Asked Questions



 Thanks feedback
Thanks feedback
 Thanks feedback
Thanks feedback
 Build your own AMR fleet within days
Build your own AMR fleet within days


